
A essência da precisão na automação moderna.
O que é um servo motor?
UM servomotor é um motor projetado para controle preciso de posição, velocidade e torque. Ao contrário dos motores convencionais, ele opera como um sistema de controle de malha fechada, que inclui: O motor ele mesmo,A dispositivo de feedback (geralmente um codificador),A Controlador/acionador de servo.
A principal vantagem de um sistema servo reside em sua mecanismo de feedback e correção. Ele compara continuamente o movimento real (por meio de sinais do codificador) com os comandos do alvo e corrige desvios instantaneamente. Isso garante extrema precisão, tornando-o indispensável em setores onde a precisão é inegociável.
Definição de servo motor: Um servo motor é um atuador que “segue” fielmente os sinais de comando para executar o controle de movimento preciso.
Sua máquina de embalagem está apresentando alguma dessas falhas relacionadas ao controle?
Problema 1: Comprimento inconsistente da embalagem e posições de selagem/corte imprecisas
- Nossos servomotores são equipados com Encoders com resolução de 2500 PPR (pulsos por revolução) ou superior., fornecendo um feedback de posicionamento extremamente preciso.
- O servoacionamento correspondente apresenta algoritmos avançados que podem executar perfis de movimento complexos com tempos de resposta inferiores a um milissegundo, garantindo que as correias de tração do filme ou as mandíbulas de selagem parem na posição exata comandada, ciclo após ciclo.
Problema 2: Alarmes frequentes de “Estouro do contador de desvios”
- Nossos servomotores CA fornecem alto torque de pico (até 3 vezes o torque nominal) para lidar com a exigente aceleração e desaceleração dos mecanismos de tração de filme e de vedação das mandíbulas.
- Os servoacionadores apresentam funções de autoajuste inteligentes que medem automaticamente a inércia da carga e otimizam os ganhos do circuito de controle. Isso garante que o motor possa seguir os comandos com precisão, sem atrasos, mesmo sob variações dinâmicas de carga.
Problema 3: Vibração e ruído excessivos durante a operação
- Fornecemos conjuntos de motor e acionamento perfeitamente combinados e ajustados de fábrica para um funcionamento suave e silencioso.
- Os drives incluem filtros de rejeição adaptativos que consegue detectar e suprimir automaticamente as frequências de ressonância mecânica, eliminando vibrações e ruídos na origem.
Problema 4: Superaquecimento e falha prematura do motor
- Ajudamos você a dimensionar corretamente o servomotor com base em uma análise completa dos requisitos de torque, velocidade e inércia da sua aplicação, garantindo que o motor opere dentro de sua faixa de operação contínua.
- Nossos motores são projetados com isolamento de alta qualidade (Classe B ou superior) e aletas de resfriamento otimizadas para garantir excelente dissipação térmica e uma longa vida útil confiável.
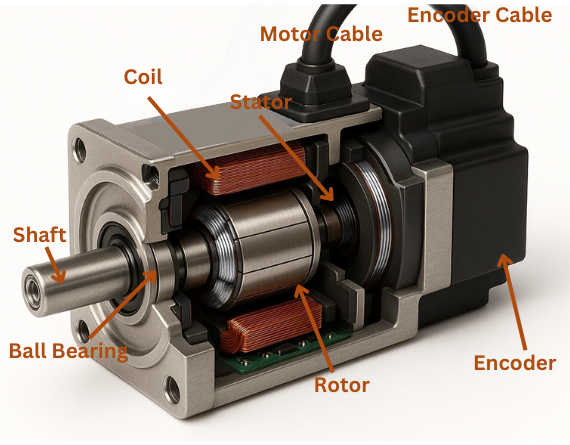
Princípio de funcionamento do servo motor
O princípio de funcionamento de um servo motor é baseado em controle de feedback de malha fechada:
- Entrada de comando: Um CLP ou controlador de movimento envia comandos de posição, velocidade ou torque ao motorista.
- Comparação: O servo driver compara esses sinais com o feedback do codificador em tempo real.
- Amplificação de potência:Com base nos desvios, o driver ajusta a tensão e a corrente nas bobinas.
- Rotação do motor:O motor gera torque e gira o eixo.
- Correção de Feedback: O codificador detecta o movimento real e envia os dados de volta.
- Ajuste Contínuo: O ciclo se repete até que o motor atinja o ponto alvo exato.
(Veja nosso diagrama do servo motor para uma explicação visual.)
Este ciclo constante garante que o motor mantenha a precisão mesmo sob perturbações, como mudanças de carga.
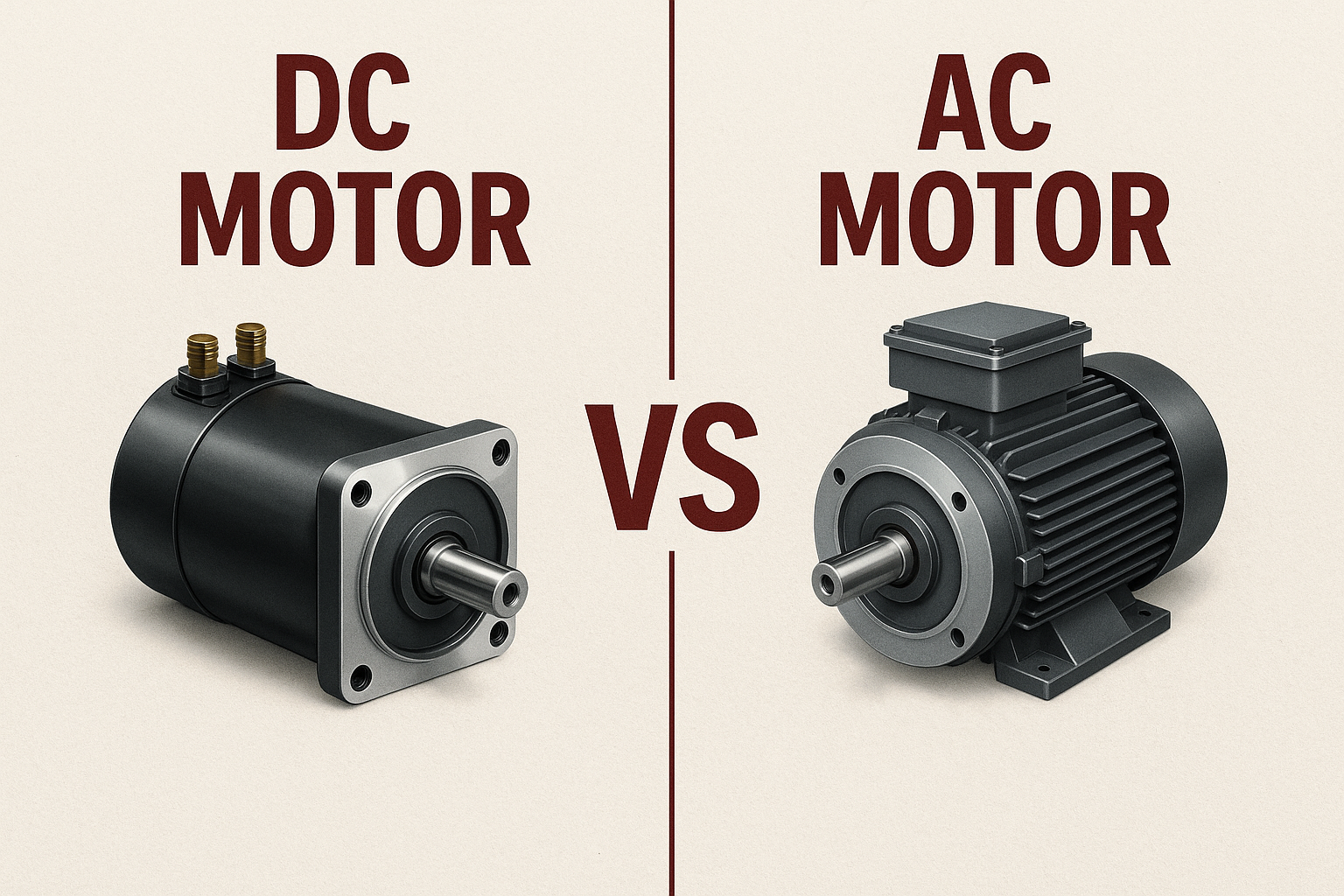
Servomotor CA vs. Servomotor CC
Os servo motores podem ser classificados como:
Servomotor CC – Design simples, controle mais fácil, historicamente comum em sistemas de baixa potência.
Servomotor CA – Dominante na indústria moderna, especialmente Motores Síncronos de Ímã Permanente (PMSM). Eles oferecem maior eficiência, maior densidade de torque, maior faixa de velocidade e baixa manutenção.
Respondendo à pergunta-chave: Um servomotor é CA ou CC?
Ambos existem, mas na automação industrial, Servo motores CA são a escolha padrão.
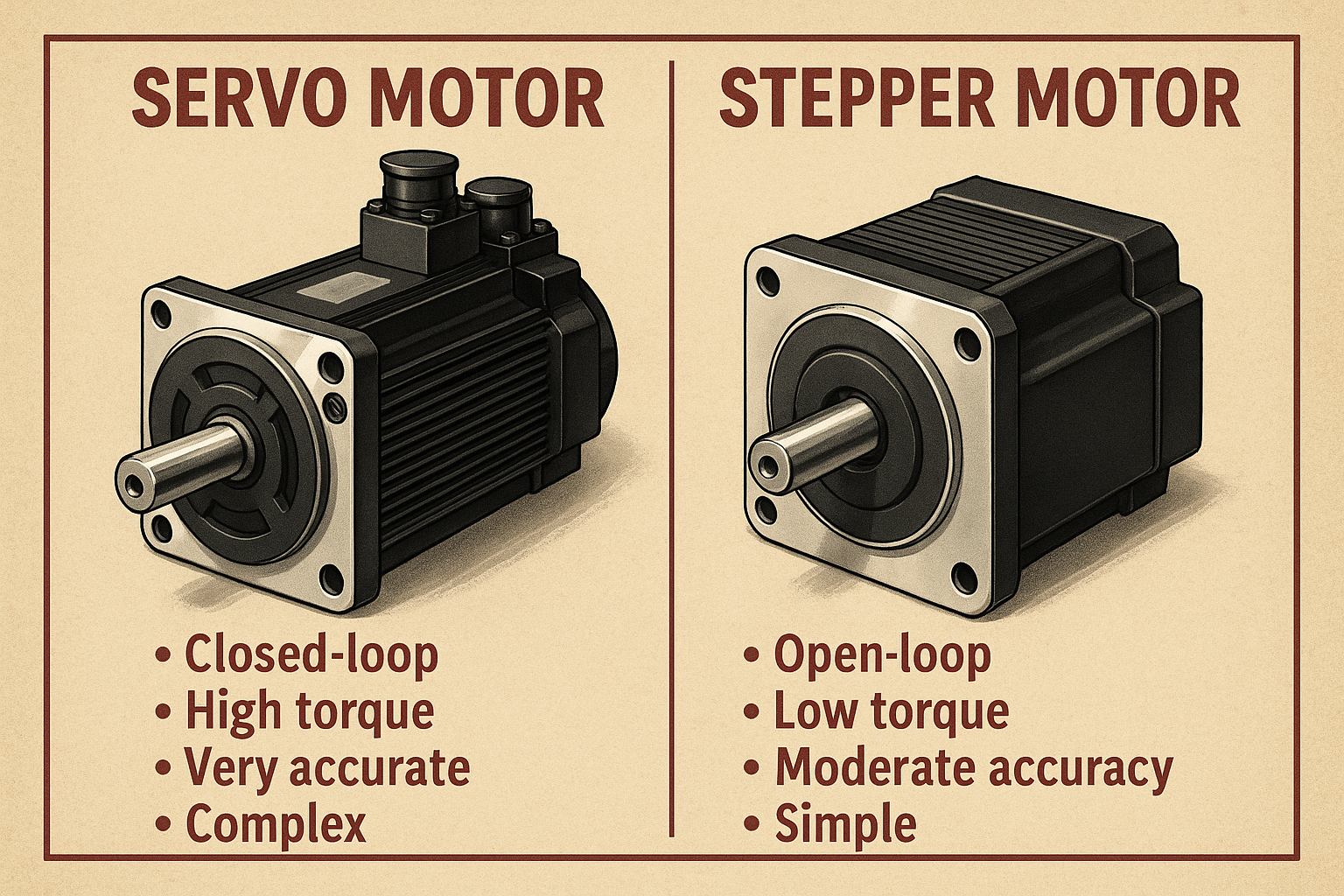
Servo Motor vs Motor Regular (Exemplo de Motor de Passo)
| Recurso | Servo Motor | Motor de passo (exemplo de motor regular) |
|---|---|---|
| Controlar | Malha fechada com feedback do codificador | Circuito aberto, sem feedback |
| Precisão | Extremamente alto | Moderado, risco de perda de passo |
| Capacidade de sobrecarga | Forte, suporta torque máximo | Fraco, trava sob sobrecarga |
| Desempenho de velocidade | Excelente estabilidade em alta velocidade | Perde torque em alta velocidade |
| Suavidade | Muito suave em baixas velocidades | Vibração em baixa velocidade |
| Resposta | Rápido e dinâmico | Início/parada mais lentos e atrasados |
| Custo | Mais alto | Mais baixo |
Qual é a diferença entre um servomotor e um motor comum?
Em resumo: os servomotores são orientado por feedback, preciso e poderoso, enquanto os motores regulares são mais simples, mas menos precisos.
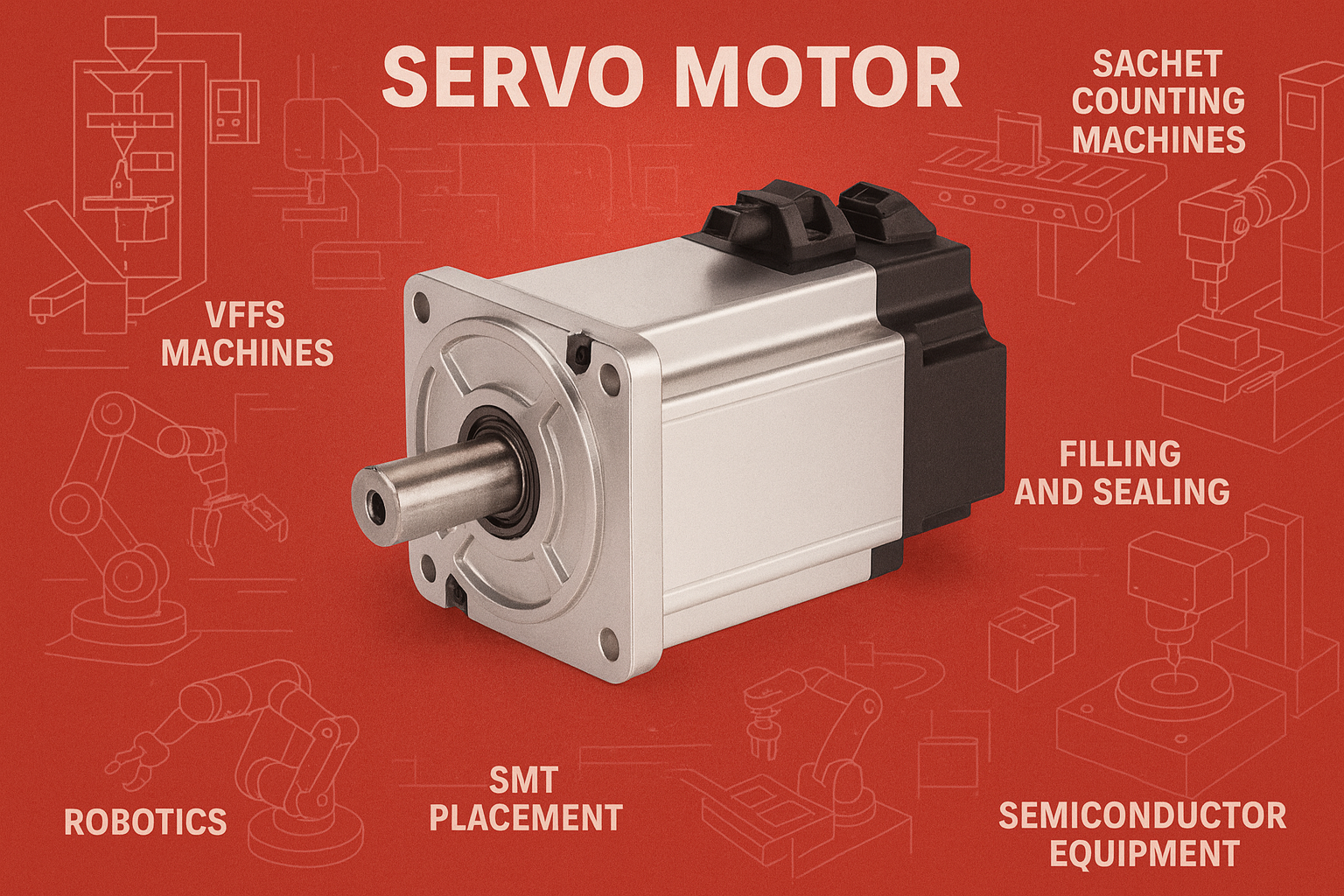
Guia de seleção de máquinas de embalagem específicas para cada aplicação
Eixo de aplicação | Requisito fundamental | Recurso de servo recomendado |
Puxando filme VFFS | Comprimento da bolsa preciso e repetível; Alta aceleração/desaceleração. | Encoder de alta resolução; Alto torque de pico; Correspondência de inércia. |
Alimentação/entrada de filme HFFS | Movimento sincronizado com a esteira transportadora do produto. | Funções eletrônicas de engrenagem/engrenagem na transmissão. |
Acionamento da mandíbula de vedação | Alto torque para pressão de vedação; Abertura/fechamento rápidos e precisos. | Alto torque máximo; opção de freio para garras verticais. |
Enchedora Volumétrica/de Rosca | Ângulo de rotação preciso para dosagem exata. | Encoder absoluto para memorização de posição após perda de energia. |
Suporte para desenrolar/rebobinar | Controle de tensão constante do filme. | Modo de controle de torque no servoacionamento. |
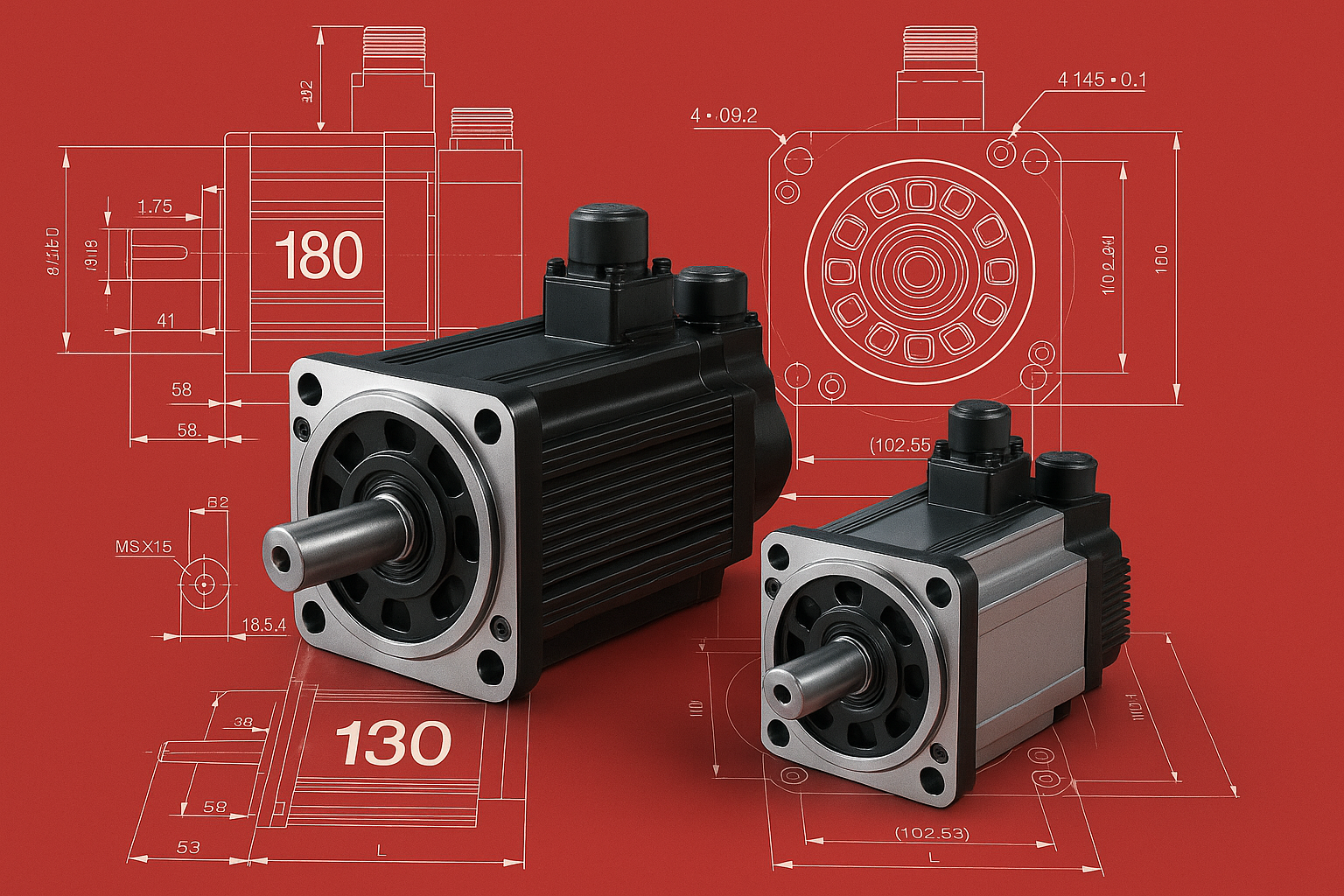
Especificações do servomotor (destaques das séries 130 e 180)
Série 130 (torque médio, alta precisão)
- Faixa de potência: 1,5 – 3,9 kW
- Torque nominal: 5 – 15 Nm
- Velocidade nominal: 1500 – 3000 rpm
- Ideal para: equipamentos CNC, linhas de automação
Série 180 (Serviço Pesado, Alta Potência)
- Faixa de potência: 2,7 – 7,5 kW
- Torque nominal: 17 – 48 Nm
- Velocidade nominal: 1000 – 2000 rpm
- Ideal para: grandes máquinas-ferramentas, braços robóticos pesados, equipamentos industriais
Especificações Gerais:
- Classe de isolamento: B (130°C)
- Classe de proteção: IP65
- Codificador: 2500 PPR Incremental (Absolutamente opcional)
- Tensão: CA 220V / 380V
Manutenção de servomotores e falhas comuns
Manutenção preventiva
- Mantenha a superfície do motor limpa e certifique-se de que as portas de ventilação estejam desobstruídas.
- Verifique e aperte as conexões dos cabos regularmente.
- Monitore a rotação do eixo para detectar resistência incomum.
- Lubrifique os rolamentos conforme as instruções do fabricante.
- Mantenha condições de instalação secas e sem vibração.
Falhas comuns e soluções
| Problema | Possível causa | Solução |
|---|---|---|
| O motor não liga | Falha de energia, erro de fiação, driver não habilitado, freio não liberado | Verifique a alimentação, religue a fiação corretamente, habilite o driver e libere o freio |
| Vibração ou ruído | Acoplamentos desalinhados, parafusos soltos, configurações de ganho muito altas | Alinhar, apertar, ajustar o ganho |
| Superaquecimento | Sobrecarga, ventilação bloqueada, atrito do rolamento | Reduza a carga, limpe o motor e verifique os rolamentos |
| Erros de posicionamento | Falha do codificador, ganho baixo, folga mecânica | Inspecionar codificador, ajustar ganho, corrigir folga |
| Códigos de alarme | Sobretensão/subtensão, sobrecorrente, falha do encoder | Estabilize a potência, reduza a carga, verifique o codificador |
Nota de segurança: Sempre desconecte a energia antes da manutenção. Para falhas complexas (por exemplo, curto-circuito nos enrolamentos), entre em contato com um serviço de assistência técnica profissional.

- Falhas comuns e resolução de problemas
Problema | Possível causa | Solução |
Erros de posicionamento | Falha no codificador; Configurações de ganho baixas; Folga mecânica em correias/engrenagens. | Inspecione o codificador e os cabos; execute novamente o ajuste automático para aumentar o ganho; inspecione e aperte os componentes mecânicos da transmissão. |
Superaquecimento | Sobrecarga contínua; Ventilação bloqueada; Alta temperatura ambiente. | Verificar o dimensionamento do motor; Limpar a superfície do motor; Garantir o resfriamento adequado do gabinete. |
Vibração ou ruído | Acoplamentos desalinhados; Configurações de ganho elevado; Ressonância mecânica. | Realinhar o eixo do motor com a carga; reduzir o ganho manualmente ou reajustar; ativar os filtros de rejeição de banda no inversor. |
Códigos de alarme do motorista | Sobretensão, sobrecorrente, falha do codificador. | Verifique a qualidade da energia de entrada; reduza as taxas de aceleração ou verifique o dimensionamento do motor; inspecione o cabo do encoder quanto a danos ou conexões soltas. |
Produto relacionado

Os servomotores são os coração do controle de movimento de precisão, permitindo que as indústrias alcancem automação, velocidade e confiabilidade. Se você precisa de um Servo motor CC para controle simples, um Servo motor industrial CA para automação de serviço pesado, ou um mini servomotor para robótica compacta, temos a solução certa.
.
Isso significa que a posição real do motor fica muito atrás da posição comandada.
Possíveis causas e soluções:
1. Problema de transmissão de sinal
Causa: Fiação incorreta, cabos de alimentação/codificador danificados ou conexões ruins causam perda de sinal.
Solução: Verifique novamente a fiação de acordo com o diagrama, inspecione os cabos para ver se há danos e reinsira os conectores para garantir o contato adequado.
2. Limitações de resposta do sistema
Causa: Baixo ganho do servo, tempo de aceleração/desaceleração muito curto ou carga excessiva.
Solução:
Aumente o ganho do loop de posição e velocidade ou use o ajuste automático de ganho.
Aumente o tempo de aceleração/desaceleração (curva S recomendada).
Diagnóstico passo a passo:
- Verifique a fonte do comando – Certifique-se de que o controlador (por exemplo, CLP) esteja realmente enviando pulsos (luz indicadora piscando).
- Verificar a fiação – Confirme se os cabos de alimentação, controle e codificador estão conectados corretamente e sem danos.
- Verifique o freio – Para modelos equipados com freio, certifique-se de que a bobina do freio esteja energizada e liberada.
- Modo de controle – Certifique-se de que o motorista esteja modo de controle de posição, não modo de torque ou velocidade.
- Correspondência de tipo de pulso – Confirme se o tipo de pulso (pulso + direção ou quadratura A/B) corresponde às configurações do driver.
Possíveis causas:
Problema com o cabo de alimentação
- Causa: Conexão de fase solta (U, V, W) causando corrente anormal.
- Solução: Reaperte todas as conexões de energia do motor.
Oscilação do Sistema
- Causa: Ganho excessivo do loop de velocidade, causando vibração mesmo quando parado.
- Solução: Ganho menor ou execute novamente o ajuste automático.
Travamento mecânico
Causa: Rolamentos danificados ou objetos estranhos bloqueando o eixo.
Solução: Desligue e gire o eixo manualmente. Se a resistência for alta, inspecione e repare o motor.
Causas e soluções:
Interferência eletromagnética
- Verifique se a blindagem do cabo de alimentação e do codificador está aterrada corretamente.
- Evite passar cabos do codificador ao longo de linhas de inversores de alta tensão.
Configurações de parâmetros
- Reduza o ganho do loop de posição se definido muito alto.
- Aumente a “tolerância de posição” para que o motor não precise microajustar infinitamente.
Problemas mecânicos
Inspecione acoplamentos, alinhamento e balanceamento de carga.
- Torque de inércia de carga: T=J×αT = J × α (J = inércia, α = aceleração angular).
- Torque de atrito: Para superar a resistência mecânica.
- Torque de gravidade: Para eixos verticais (eixo Z).
- Forças externas:Como força de corte.
- Regra prática: Adicione uma margem de segurança de 20–30% após os cálculos.
- Definição: Relação entre a inércia da carga e a inércia do rotor do motor.
- Importância: Se a proporção for >10:1, a resposta se torna lenta, ocorre overshoot e vibração.
- Proporção ideal: ≤5:1 para melhor desempenho.
- Solução: Use uma caixa de engrenagens ou uma inércia maior servomotor se ocorrer incompatibilidade.
Codificador incremental: Emite posição relativa; requer retorno ao ponto inicial após a inicialização.
Codificador Absoluto: Lembra a posição absoluta mesmo após perda de energia; não requer homing.
Qual escolher?
- Use incremental se o homing for simples e o custo for crítico.
- Use absoluto se o tempo de inatividade e a precisão forem críticos (por exemplo, robótica, sistemas multieixos).
Cabos de energia: Pode ser estendido, mas requer um calibre mais grosso para minimizar a queda de tensão.
Cabos do codificador: Muito sensível; evite extensões além de 20 m. Use par trançado blindado e considere amplificadores/filtros, se necessário.
Sim. O aterramento adequado garante a segurança e minimiza a interferência.
Terminal PE do motor → conecte ao PE do driver com fio curto e grosso.
Terminal PE do driver → conecte à barra de aterramento do gabinete.
Blindagem do cabo → aterramento somente no lado do driver para evitar loops de aterramento.
- Alta rigidez: Resposta rápida, resiste a perturbações de carga, mas apresenta risco de oscilação.
- Baixa rigidez: Operação suave, mas menor resistência a perturbações.
Ajuste: Aumente os ganhos do loop gradualmente até atingir a resposta ideal sem vibração. Use o ajuste automático de ganho do driver, se disponível.
Causa: O servo aplica continuamente pequenas correntes corretivas para manter a posição (“ruído do servo”).
Correções:
Configurações de ganho de loop mais baixas.
Aplique filtros de entalhe para frequências de ressonância.
Aumente a “tolerância na posição” para que o sistema não corrija em excesso.
Servo motores compactos frequentemente usados em Modelos RC, drones e robótica educacional.
Verifique o manual do produto para obter informações completas especificações do servomotor, incluindo detalhes dos pinos do servo motor, princípio de funcionamento e diagramas de fiação.