
Cốt lõi của sự chính xác trong tự động hóa hiện đại
Động cơ Servo là gì?
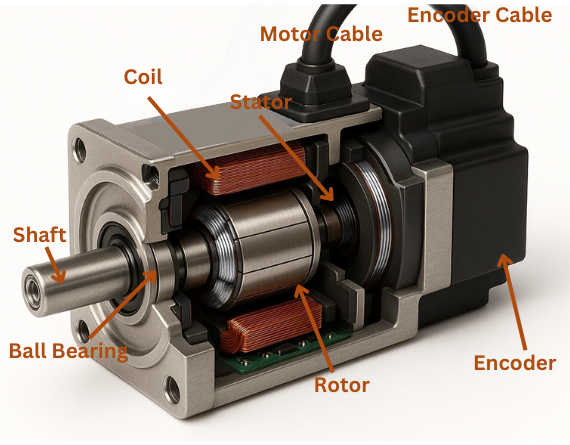
MỘT động cơ servo là một động cơ được thiết kế cho kiểm soát vị trí, tốc độ và mô-men xoắn chính xác. Không giống như động cơ thông thường, nó hoạt động như một hệ thống điều khiển vòng kín, bao gồm:The động cơ chính nó, A thiết bị phản hồi (thường là bộ mã hóa), A Bộ điều khiển/lái servo.
Ưu điểm cốt lõi của hệ thống servo nằm ở cơ chế phản hồi và hiệu chỉnh. Nó liên tục so sánh chuyển động thực tế (thông qua tín hiệu mã hóa) với các lệnh mục tiêu và hiệu chỉnh độ lệch ngay lập tức. Điều này đảm bảo độ chính xác cực cao, khiến nó trở nên không thể thiếu trong các ngành công nghiệp đòi hỏi độ chính xác cao.
Định nghĩa động cơ Servo: Động cơ servo là bộ truyền động “tuân theo” tín hiệu lệnh một cách trung thực để thực hiện điều khiển chuyển động chính xác.
Máy đóng gói của bạn có đang gặp phải những lỗi liên quan đến điều khiển này không?
Vấn đề 1: Chiều dài túi không đồng nhất và vị trí hàn/cắt không chính xác
- Các động cơ servo của chúng tôi được trang bị Bộ mã hóa có độ phân giải 2500 PPR (Xung trên mỗi vòng quay) hoặc cao hơn., cung cấp phản hồi vị trí cực kỳ chính xác.
- Hệ thống truyền động servo được thiết kế phù hợp với các thuật toán tiên tiến, có khả năng thực hiện các cấu hình chuyển động phức tạp với thời gian phản hồi dưới mili giây, đảm bảo các dây đai kéo màng hoặc các hàm hàn dừng lại ở vị trí chính xác được lệnh, hết chu kỳ này đến chu kỳ khác.
Vấn đề 2: Thường xuyên xuất hiện cảnh báo “Tràn bộ đếm độ lệch”
- Động cơ servo AC của chúng tôi cung cấp mô-men xoắn cực đại cao (lên đến 3 lần mô-men xoắn định mức) để xử lý quá trình tăng tốc và giảm tốc đòi hỏi khắt khe của cơ cấu hàm kéo và hàn màng.
- Các bộ truyền động servo có các tính năng sau: chức năng tự điều chỉnh thông minh Hệ thống tự động đo quán tính tải và tối ưu hóa hệ số khuếch đại vòng điều khiển. Điều này đảm bảo động cơ có thể thực hiện các lệnh một cách chính xác mà không bị trễ, ngay cả khi tải thay đổi động.
Vấn đề 3: Rung động và tiếng ồn quá mức trong quá trình vận hành
- Chúng tôi cung cấp các cặp động cơ và bộ điều khiển được phối ghép hoàn hảo, được hiệu chỉnh tại nhà máy để hoạt động êm ái và yên tĩnh.
- Các ổ đĩa bao gồm bộ lọc notch thích ứng Có khả năng tự động phát hiện và triệt tiêu các tần số cộng hưởng cơ học, loại bỏ rung động và tiếng ồn ngay tại nguồn.
Vấn đề 4: Động cơ quá nóng và hỏng hóc sớm
- Chúng tôi hỗ trợ bạn lựa chọn kích thước động cơ servo phù hợp dựa trên phân tích kỹ lưỡng các yêu cầu về mô-men xoắn, tốc độ và quán tính của ứng dụng, đảm bảo động cơ hoạt động trong vùng làm việc liên tục của nó.
- Động cơ của chúng tôi được thiết kế với lớp cách điện cao cấp (loại B trở lên) và các cánh tản nhiệt được tối ưu hóa để đảm bảo khả năng tản nhiệt tuyệt vời và tuổi thọ hoạt động lâu dài, đáng tin cậy.
Nguyên lý hoạt động của động cơ Servo
Các nguyên lý hoạt động của động cơ servo dựa trên điều khiển phản hồi vòng kín:
- Đầu vào lệnh: PLC hoặc bộ điều khiển chuyển động gửi lệnh về vị trí, tốc độ hoặc mô-men xoắn đến người lái.
- So sánh: Bộ điều khiển servo so sánh các tín hiệu này với phản hồi của bộ mã hóa thời gian thực.
- Khuếch đại công suất: Dựa trên độ lệch, trình điều khiển sẽ điều chỉnh điện áp và dòng điện đến các cuộn dây.
- Động cơ quay: Động cơ tạo ra mô-men xoắn và làm quay trục.
- Phản hồi Sửa lỗi: Bộ mã hóa phát hiện chuyển động thực tế và gửi dữ liệu trở lại.
- Điều chỉnh liên tục: Chu trình lặp lại cho đến khi động cơ đạt đến điểm mục tiêu chính xác.
(Xem của chúng tôi sơ đồ động cơ servo để có lời giải thích trực quan.)
Chu kỳ liên tục này đảm bảo động cơ duy trì độ chính xác ngay cả khi có sự nhiễu loạn như thay đổi tải.
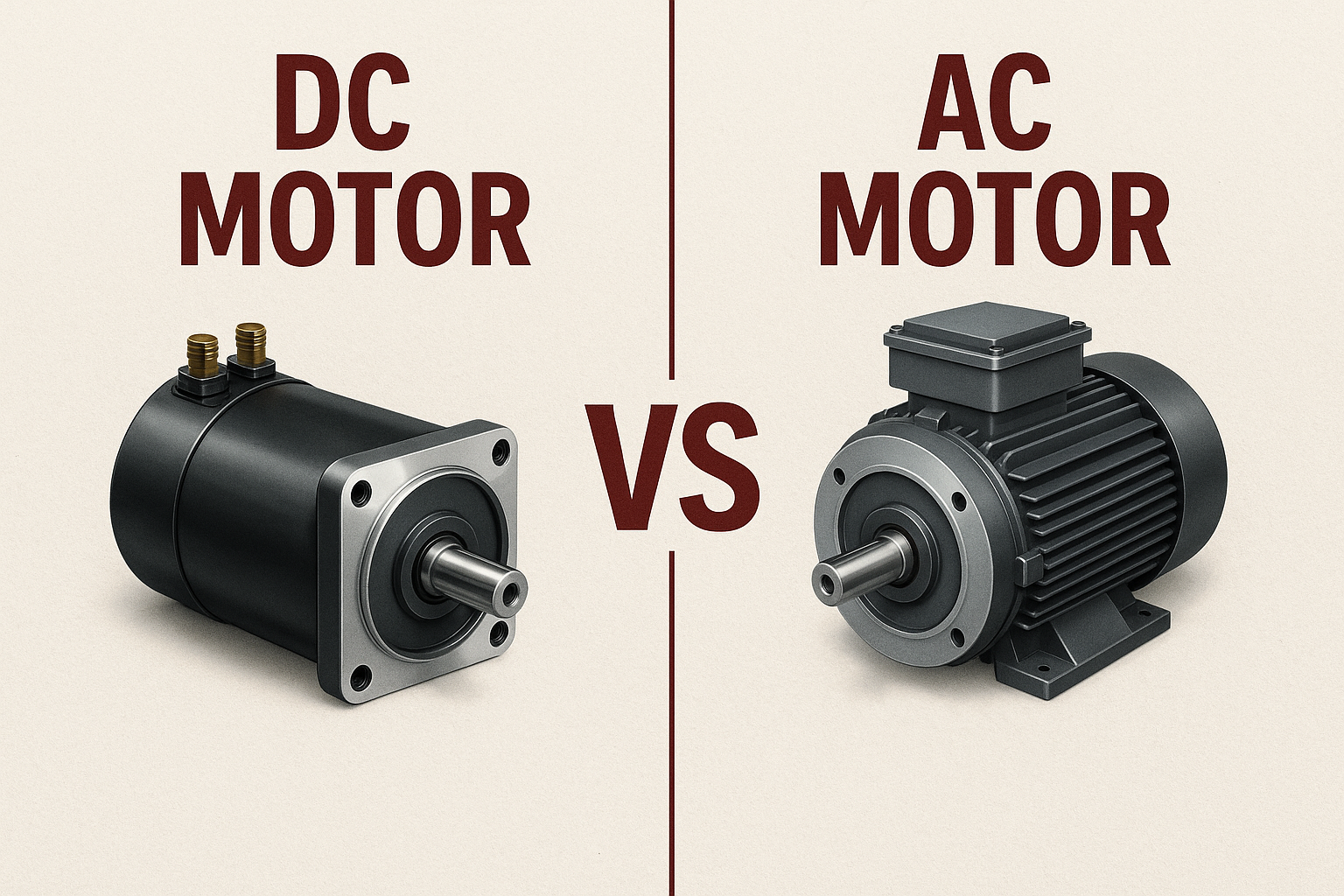
Động cơ Servo AC so với Động cơ Servo DC
Động cơ servo có thể được phân loại thành:
Động cơ Servo DC – Thiết kế đơn giản, dễ điều khiển, thường được sử dụng trong các hệ thống công suất thấp.
Động cơ Servo AC – Chiếm ưu thế trong công nghiệp hiện đại, đặc biệt là Động cơ đồng bộ nam châm vĩnh cửu (PMSM). Chúng mang lại hiệu suất cao hơn, mật độ mô-men xoắn lớn hơn, phạm vi tốc độ rộng hơn và bảo trì thấp.
Trả lời câu hỏi chính: Động cơ servo là AC hay DC?
Cả hai đều tồn tại, nhưng trong tự động hóa công nghiệp, Động cơ servo AC là sự lựa chọn tiêu chuẩn.
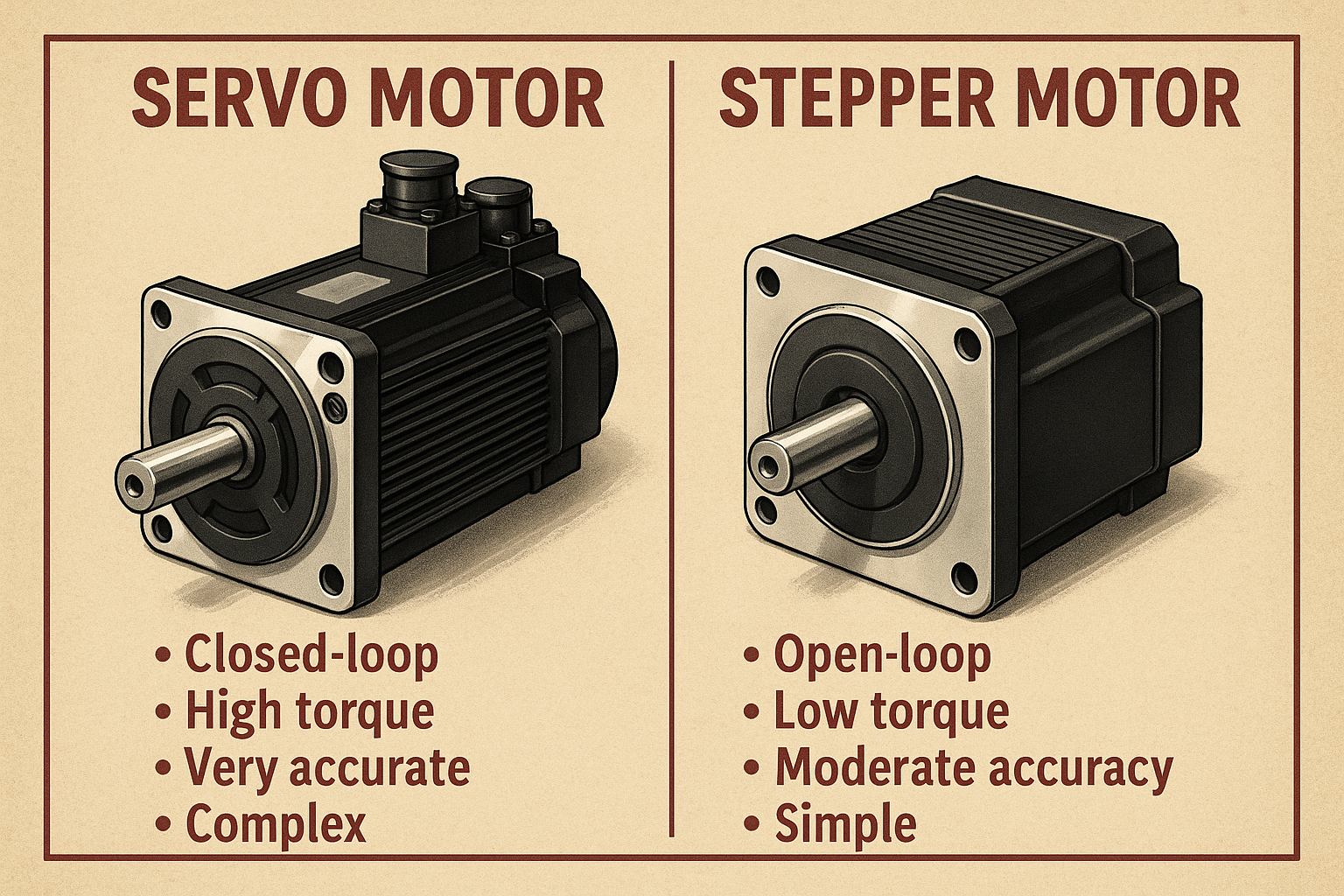
Động cơ Servo so với Động cơ thông thường (Ví dụ về Động cơ bước)
| Tính năng | Động cơ Servo | Động cơ bước (Ví dụ về động cơ thông thường) |
|---|---|---|
| Điều khiển | Vòng kín với phản hồi mã hóa | Vòng hở, không có phản hồi |
| Độ chính xác | Cực kỳ cao | Trung bình, nguy cơ mất bước |
| Khả năng quá tải | Mạnh mẽ, xử lý mô-men xoắn cực đại | Yếu, chết máy khi quá tải |
| Tốc độ Hiệu suất | Độ ổn định tuyệt vời, tốc độ cao | Mất mô-men xoắn ở tốc độ cao |
| Độ mịn | Rất mượt mà ở tốc độ thấp | Rung ở tốc độ thấp |
| Phản ứng | Nhanh chóng và năng động | Bắt đầu/dừng chậm hơn, chậm trễ |
| Trị giá | Cao hơn | Thấp hơn |
Sự khác biệt giữa động cơ servo và động cơ thông thường là gì?
Tóm lại: Động cơ servo là phản hồi được thúc đẩy, chính xác và mạnh mẽtrong khi động cơ thông thường đơn giản hơn nhưng kém chính xác hơn.
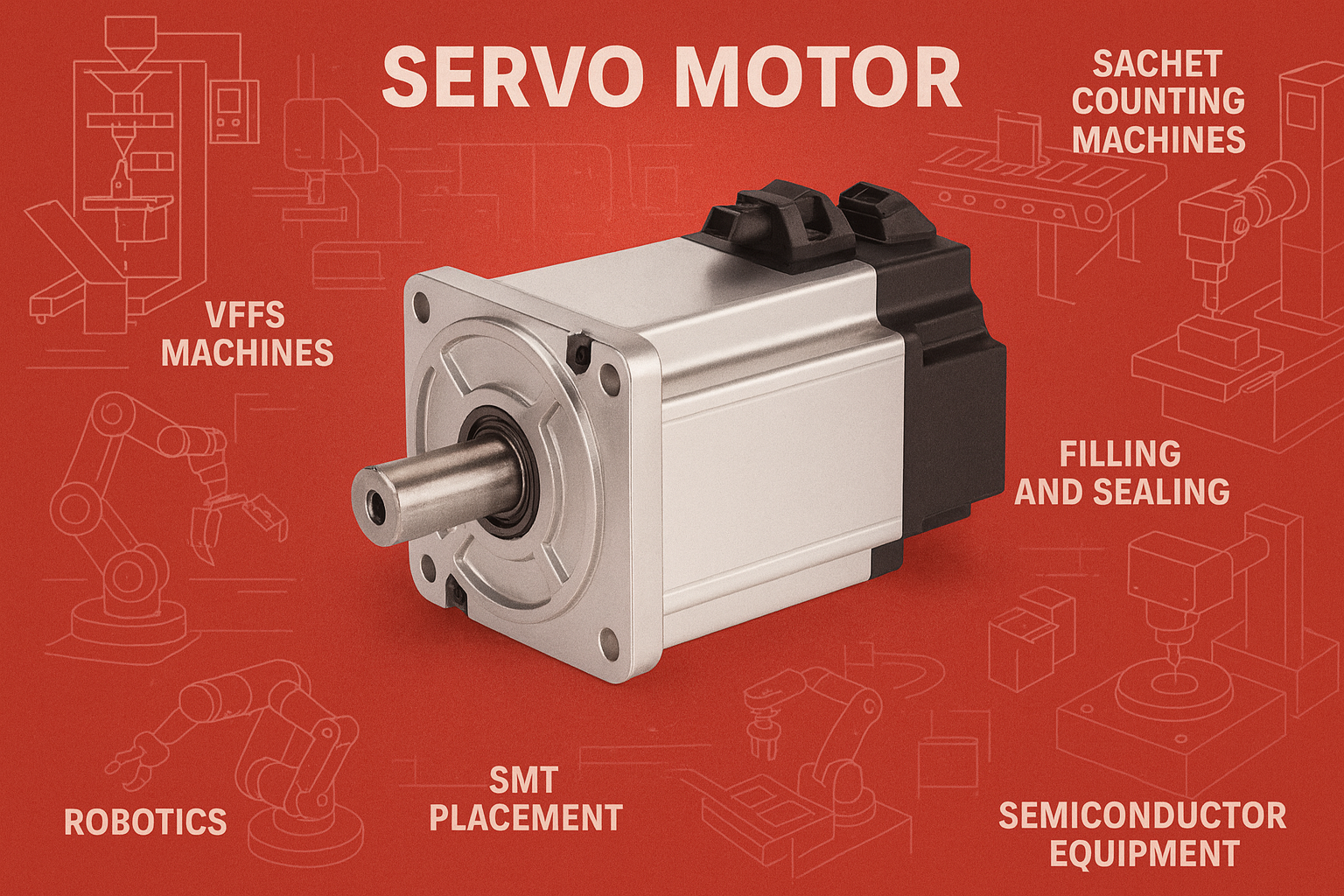
Hướng dẫn lựa chọn máy đóng gói theo ứng dụng cụ thể
Trục ứng dụng | Yêu cầu chính | Tính năng Servo được đề xuất |
Kéo phim VFFS | Chiều dài túi chính xác, có thể lặp lại; Khả năng tăng tốc/giảm tốc cao. | Bộ mã hóa độ phân giải cao; Mô-men xoắn cực đại cao; Khớp quán tính. |
Bộ cấp/nạp phim HFFS | Chuyển động đồng bộ với băng tải sản phẩm. | Các chức năng truyền động bằng bánh răng/cam điện tử. |
Cơ cấu truyền động hàm kẹp | Mô-men xoắn cao tạo áp suất làm kín; Đóng/mở nhanh chóng và chính xác. | Mô-men xoắn cực đại cao; Tùy chọn phanh cho hàm kẹp thẳng đứng. |
Máy chiết rót trục vít/định lượng | Góc xoay chính xác giúp định lượng chính xác. | Bộ mã hóa tuyệt đối dùng để ghi nhớ vị trí sau khi mất điện. |
Giá đỡ tua/tháo cuộn | Kiểm soát độ căng màng phim ổn định. | Chế độ điều khiển mô-men xoắn trong hệ thống truyền động servo. |
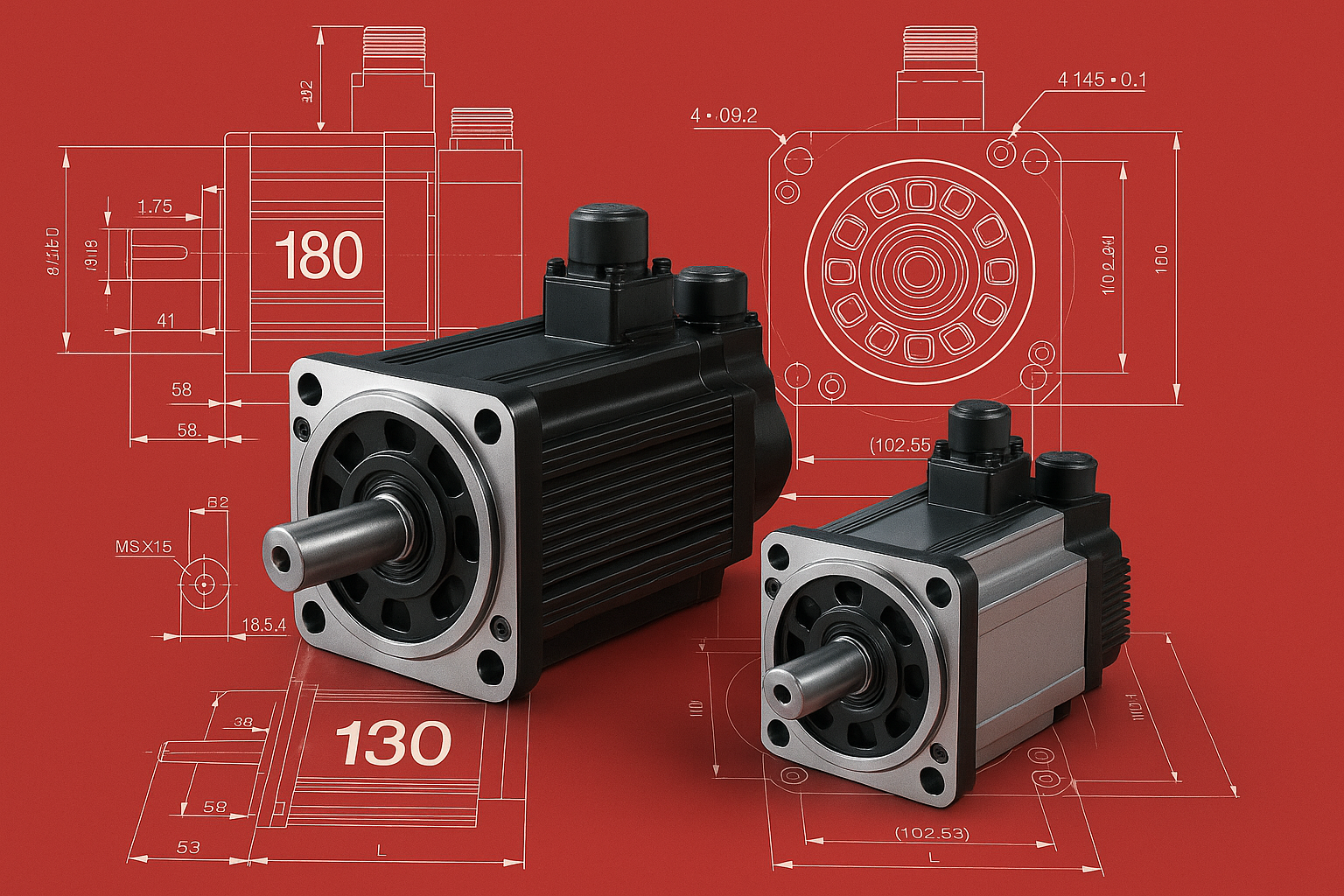
Thông số kỹ thuật động cơ Servo (Điểm nổi bật của dòng 130 & 180)
Dòng 130 (Mô-men xoắn trung bình, Độ chính xác cao)
- Phạm vi công suất: 1,5 – 3,9 kW
- Mô-men xoắn định mức: 5 – 15 Nm
- Tốc độ định mức: 1500 – 3000 vòng/phút
- Lý tưởng cho: Thiết bị CNC, dây chuyền tự động hóa
Dòng 180 (Công suất lớn, chịu tải nặng)
- Phạm vi công suất: 2,7 – 7,5 kW
- Mô-men xoắn định mức: 17 – 48 Nm
- Tốc độ định mức: 1000 – 2000 vòng/phút
- Lý tưởng cho: Máy công cụ lớn, cánh tay robot hạng nặng, thiết bị công nghiệp
Thông số kỹ thuật chung:
- Lớp cách điện: B (130°C)
- Lớp bảo vệ: IP65
- Bộ mã hóa: 2500 PPR tăng dần (Tùy chọn tuyệt đối)
- Điện áp: Điện áp xoay chiều 220V / 380V
Bảo trì động cơ Servo và các lỗi thường gặp
Bảo trì phòng ngừa
- Giữ bề mặt động cơ sạch sẽ và đảm bảo các lỗ thông gió thông thoáng.
- Kiểm tra và siết chặt các kết nối cáp thường xuyên.
- Theo dõi sự quay của trục để phát hiện lực cản bất thường.
- Bôi trơn vòng bi theo hướng dẫn của nhà sản xuất.
- Duy trì điều kiện lắp đặt khô ráo và không rung động.
Lỗi thường gặp & Giải pháp
| Vấn đề | Nguyên nhân có thể | Giải pháp |
|---|---|---|
| Động cơ không khởi động | Mất điện, lỗi hệ thống dây điện, trình điều khiển chưa được bật, phanh chưa nhả | Kiểm tra nguồn điện, nối lại dây điện đúng cách, bật trình điều khiển, nhả phanh |
| Rung động hoặc tiếng ồn | Khớp nối không thẳng hàng, ốc vít lỏng, cài đặt mức tăng quá cao | Căn chỉnh, siết chặt, điều chỉnh độ lợi |
| Quá nhiệt | Quá tải, thông gió bị chặn, ma sát ổ trục | Giảm tải, vệ sinh động cơ, kiểm tra ổ trục |
| Lỗi định vị | Lỗi bộ mã hóa, độ lợi thấp, độ rơ cơ học | Kiểm tra bộ mã hóa, điều chỉnh độ khuếch đại, sửa lỗi độ rơ |
| Mã báo động | Điện áp quá/thấp, quá dòng, lỗi bộ mã hóa | Ổn định nguồn điện, giảm tải, kiểm tra bộ mã hóa |
Lưu ý an toàn: Luôn ngắt nguồn điện trước khi bảo trì. Đối với các lỗi phức tạp (ví dụ: đoản mạch cuộn dây), hãy liên hệ với dịch vụ chuyên nghiệp.

- Các lỗi thường gặp và cách khắc phục
Vấn đề | Nguyên nhân có thể | Giải pháp |
Lỗi định vị | Lỗi bộ mã hóa; Cài đặt độ khuếch đại thấp; Độ rơ cơ học trong dây đai/bánh răng. | Kiểm tra bộ mã hóa và dây cáp; Chạy lại quá trình tự điều chỉnh để tăng độ khuếch đại; Kiểm tra và siết chặt các bộ phận truyền động cơ khí. |
Quá nhiệt | Tình trạng quá tải liên tục; Thông gió bị tắc nghẽn; Nhiệt độ môi trường cao. | Kiểm tra kích thước động cơ; Làm sạch bề mặt động cơ; Đảm bảo làm mát tủ điện đầy đủ. |
Rung động hoặc tiếng ồn | Các khớp nối không thẳng hàng; Cài đặt độ khuếch đại cao; Cộng hưởng cơ học. | Căn chỉnh lại trục động cơ cho phù hợp với tải; Giảm độ khuếch đại thủ công hoặc hiệu chỉnh lại; Kích hoạt bộ lọc notch trong bộ điều khiển. |
Mã cảnh báo người lái xe | Quá áp, quá dòng, lỗi bộ mã hóa. | Kiểm tra chất lượng nguồn điện đầu vào; Giảm tốc độ tăng tốc hoặc kiểm tra kích thước động cơ; Kiểm tra cáp bộ mã hóa xem có bị hư hỏng hoặc lỏng lẻo không. |
Sản phẩm liên quan

Động cơ servo là trái tim của điều khiển chuyển động chính xác, cho phép các ngành công nghiệp đạt được tự động hóa, tốc độ và độ tin cậy. Cho dù bạn cần Động cơ servo DC để kiểm soát đơn giản, một Động cơ servo công nghiệp AC cho tự động hóa hạng nặng, hoặc một động cơ servo mini đối với robot nhỏ gọn, chúng tôi có giải pháp phù hợp.
.
Điều này có nghĩa là vị trí thực tế của động cơ chậm hơn nhiều so với vị trí được chỉ huy.
Nguyên nhân có thể xảy ra và giải pháp:
1.Vấn đề truyền tín hiệu
Gây ra: Dây điện không đúng, bộ mã hóa/cáp nguồn bị hỏng hoặc kết nối kém gây mất tín hiệu.
Giải pháp: Kiểm tra lại hệ thống dây điện theo sơ đồ, kiểm tra xem cáp có bị hỏng không và lắp lại các đầu nối để đảm bảo tiếp xúc đúng cách.
2. Hạn chế phản hồi của hệ thống
Gây ra: Độ lợi servo thấp, thời gian tăng tốc/giảm tốc quá ngắn hoặc tải quá mức.
Giải pháp:
Tăng độ lợi vòng lặp vị trí và tốc độ hoặc sử dụng điều chỉnh độ lợi tự động.
Kéo dài thời gian tăng tốc/giảm tốc (khuyến nghị sử dụng đường cong chữ S).
Chẩn đoán từng bước:
- Kiểm tra nguồn lệnh – Đảm bảo bộ điều khiển (ví dụ: PLC) thực sự đang gửi xung (đèn báo nhấp nháy).
- Kiểm tra hệ thống dây điện – Xác nhận cáp nguồn, cáp điều khiển và cáp mã hóa được kết nối đúng cách và không bị hư hỏng.
- Kiểm tra phanh – Đối với các mẫu xe có trang bị phanh, hãy đảm bảo cuộn dây phanh được cấp điện và nhả ra.
- Chế độ điều khiển – Đảm bảo tài xế đã ở trong chế độ điều khiển vị trí, không phải chế độ mô-men xoắn hoặc tốc độ.
- Phù hợp loại xung – Xác nhận loại xung (xung + hướng hoặc vuông góc A/B) phù hợp với cài đặt của trình điều khiển.
Nguyên nhân có thể xảy ra:
Sự cố cáp nguồn
- Gây ra: Kết nối pha lỏng (U, V, W) gây ra dòng điện bất thường.
- Giải pháp: Siết chặt lại tất cả các kết nối nguồn điện của động cơ.
Hệ thống dao động
- Gây ra: Vòng lặp tăng tốc quá mức, dẫn đến rung động ngay cả khi đứng yên.
- Giải pháp: Giảm độ lợi hoặc tự động điều chỉnh lại.
Khóa cơ học
Gây ra: Vòng bi bị hỏng hoặc có vật lạ kẹt vào trục.
Giải pháp: Tắt nguồn và xoay trục bằng tay. Nếu điện trở cao, hãy kiểm tra và sửa chữa động cơ.
Nguyên nhân và cách khắc phục:
Nhiễu điện từ
- Kiểm tra xem cáp nguồn và cáp mã hóa có được nối đất đúng cách không.
- Tránh đi dây cáp mã hóa dọc theo đường dây biến tần điện áp cao.
Cài đặt tham số
- Giảm độ lợi vòng lặp vị trí nếu đặt quá cao.
- Tăng “dung sai vị trí” để động cơ không phải điều chỉnh vi mô liên tục.
Các vấn đề cơ học
Kiểm tra các khớp nối, sự căn chỉnh và cân bằng tải.
- Tải mô-men quán tính: T=J×αT = J × α (J = quán tính, α = gia tốc góc).
- Mô-men xoắn ma sát: Để khắc phục sức cản cơ học.
- Mô-men xoắn trọng lực: Đối với trục dọc (trục Z).
- Lực lượng bên ngoài: Chẳng hạn như lực cắt.
- Nguyên tắc chung: Thêm biên độ an toàn 20–30% sau khi tính toán.
- Sự định nghĩa: Tỷ số giữa quán tính tải và quán tính rôto động cơ.
- Tầm quan trọng: Nếu tỷ lệ >10:1, phản ứng sẽ chậm chạp, vượt mức và xảy ra rung động.
- Tỷ lệ lý tưởng: ≤5:1 để có hiệu suất tốt nhất.
- Giải pháp: Sử dụng hộp số hoặc quán tính lớn hơn động cơ servo nếu xảy ra sự không khớp.
Bộ mã hóa gia tăng: Đưa ra vị trí tương đối; yêu cầu về vị trí ban đầu sau khi bật nguồn.
Bộ mã hóa tuyệt đối: Ghi nhớ vị trí tuyệt đối ngay cả khi mất điện; không cần đưa về vị trí ban đầu.
Nên chọn cái nào?
- Sử dụng phương pháp gia tăng nếu việc di chuyển về nhà đơn giản và chi phí là quan trọng.
- Sử dụng tuyệt đối nếu thời gian chết và độ chính xác là quan trọng (ví dụ: robot, hệ thống đa trục).
Cáp nguồn: Có thể kéo dài nhưng cần dây dày hơn để giảm thiểu sụt áp.
Cáp mã hóa: Rất nhạy; tránh kéo dài quá 20m. Sử dụng cáp xoắn đôi có vỏ bọc và cân nhắc lắp thêm bộ khuếch đại/bộ lọc nếu cần.
Có. Nối đất đúng cách đảm bảo an toàn và giảm thiểu nhiễu.
Đầu cực PE của động cơ → kết nối với bộ điều khiển PE bằng dây ngắn và dày.
Đầu nối PE của trình điều khiển → kết nối với thanh nối đất của tủ.
Vỏ cáp → chỉ nối đất ở phía người lái để tránh vòng nối đất.
- Độ cứng cao: Phản ứng nhanh, chống nhiễu tải nhưng có nguy cơ dao động.
- Độ cứng thấp: Hoạt động trơn tru nhưng khả năng chống nhiễu yếu hơn.
Điều chỉnh: Tăng dần độ khuếch đại vòng lặp cho đến khi đạt được phản hồi tối ưu mà không bị rung. Sử dụng chức năng điều chỉnh độ khuếch đại tự động của trình điều khiển nếu có.
Gây ra: Servo liên tục áp dụng dòng điện hiệu chỉnh nhỏ để giữ vị trí (“tiếng ồn servo”).
Sửa lỗi:
Giảm cài đặt độ lợi vòng lặp.
Áp dụng bộ lọc notch cho tần số cộng hưởng.
Tăng “dung sai vị trí” để hệ thống không điều chỉnh quá mức.
Động cơ servo nhỏ gọn thường được sử dụng trong Mô hình điều khiển từ xa, máy bay không người lái và robot giáo dục.
Kiểm tra hướng dẫn sử dụng sản phẩm để biết đầy đủ thông số kỹ thuật động cơ servo, bao gồm chi tiết chân động cơ servo, nguyên lý hoạt động và sơ đồ đấu dây.