
El corazón de la precisión en la automatización moderna
¿Qué es un servomotor?
A servomotor es un motor diseñado para control preciso de posición, velocidad y par. A diferencia de los motores convencionales, funciona como un sistema de control de circuito cerrado, que incluye:El motor en sí,A dispositivo de retroalimentación (normalmente un codificador),A servocontrolador/controlador.
La principal ventaja de un sistema servo reside en su mecanismo de retroalimentación y correcciónCompara continuamente el movimiento real (mediante las señales del codificador) con los comandos objetivo y corrige las desviaciones al instante. Esto garantiza una precisión extrema, lo que lo hace indispensable en industrias donde la precisión es fundamental.
Definición de servomotor: Un servomotor es un actuador que “sigue” fielmente las señales de comando para ejecutar un control de movimiento preciso.
¿Su máquina de envasado presenta estos fallos relacionados con el control?
Problema 1: Longitud de bolsa inconsistente y posiciones de sellado/corte inexactas
- Nuestros servomotores están equipados con Codificadores de 2500 PPR (pulsos por revolución) o de mayor resolución, proporcionando una retroalimentación de posición extremadamente precisa.
- El servoaccionamiento adaptado presenta algoritmos avanzados que pueden ejecutar perfiles de movimiento complejos con tiempos de respuesta de submilisegundos, lo que garantiza que las correas de tracción de la película o las mordazas de sellado se detengan en la posición exacta ordenada, ciclo tras ciclo.
Problema 2: Alarmas frecuentes de “Desbordamiento del contador de desviación”
- Nuestros servomotores de CA brindan un alto par máximo (hasta 3 veces el par nominal) para manejar la exigente aceleración y desaceleración de los mecanismos de tracción y sellado de películas.
- La característica de los servoaccionamientos funciones de autoajuste inteligente Que miden automáticamente la inercia de la carga y optimizan las ganancias del lazo de control. Esto garantiza que el motor pueda seguir las órdenes con precisión y sin retardo, incluso bajo cambios dinámicos de carga.
Problema 3: Vibración y ruido excesivos durante el funcionamiento
- Proporcionamos pares de motores y variadores perfectamente combinados y ajustados de fábrica para un funcionamiento suave y silencioso.
- Las unidades incluyen filtros de muesca adaptativos que puede detectar y suprimir automáticamente las frecuencias de resonancia mecánica, eliminando la vibración y el ruido en la fuente.
Problema 4: Sobrecalentamiento del motor y falla prematura
- Le ayudamos a dimensionar correctamente el servomotor en función de un análisis exhaustivo de los requisitos de torque, velocidad e inercia de su aplicación, garantizando que el motor funcione dentro de su zona de trabajo continuo.
- Nuestros motores están diseñados con aislamiento de alto grado (Clase B o superior) y aletas de enfriamiento optimizadas para garantizar una excelente disipación térmica y una vida útil larga y confiable.
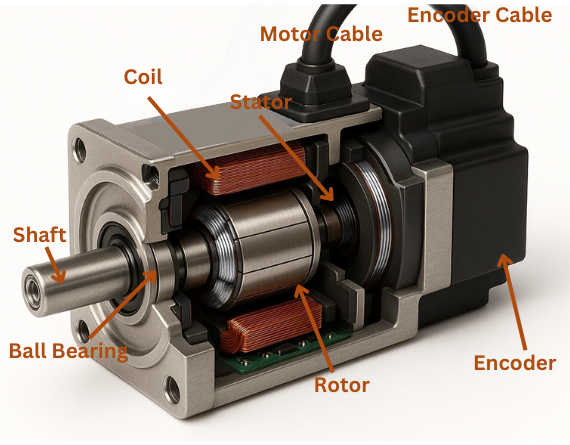
Principio de funcionamiento del servomotor
El Principio de funcionamiento de un servomotor se basa en control de retroalimentación de bucle cerrado:
- Entrada de comando:Un PLC o controlador de movimiento envía comandos de posición, velocidad o torque al conductor.
- Comparación:El servocontrolador compara estas señales con la retroalimentación del codificador en tiempo real.
- Amplificación de potencia:En función de las desviaciones, el controlador ajusta el voltaje y la corriente a las bobinas.
- Rotación del motor:El motor genera torque y hace girar el eje.
- Corrección de retroalimentación:El codificador detecta el movimiento real y envía datos.
- Ajuste continuo:El ciclo se repite hasta que el motor alcanza el punto objetivo exacto.
(Ver nuestro diagrama del servomotor para una explicación visual.)
Este ciclo constante garantiza que el motor mantenga la precisión incluso ante perturbaciones como cambios de carga.
Servomotor de CA vs. servomotor de CC
Los servomotores se pueden clasificar en:
Servomotor de CC – Diseño simple, control más fácil, históricamente común en sistemas de bajo consumo.
Servomotor de CA – Dominante en la industria moderna, especialmente Motores síncronos de imanes permanentes (PMSM)Ofrecen mayor eficiencia, mayor densidad de torque, rango de velocidad más amplio y bajo mantenimiento.
Respondiendo preguntas clave: ¿Un servomotor es CA o CC?
Ambos existen, pero en la automatización industrial, Servomotores de CA son la opción estándar.
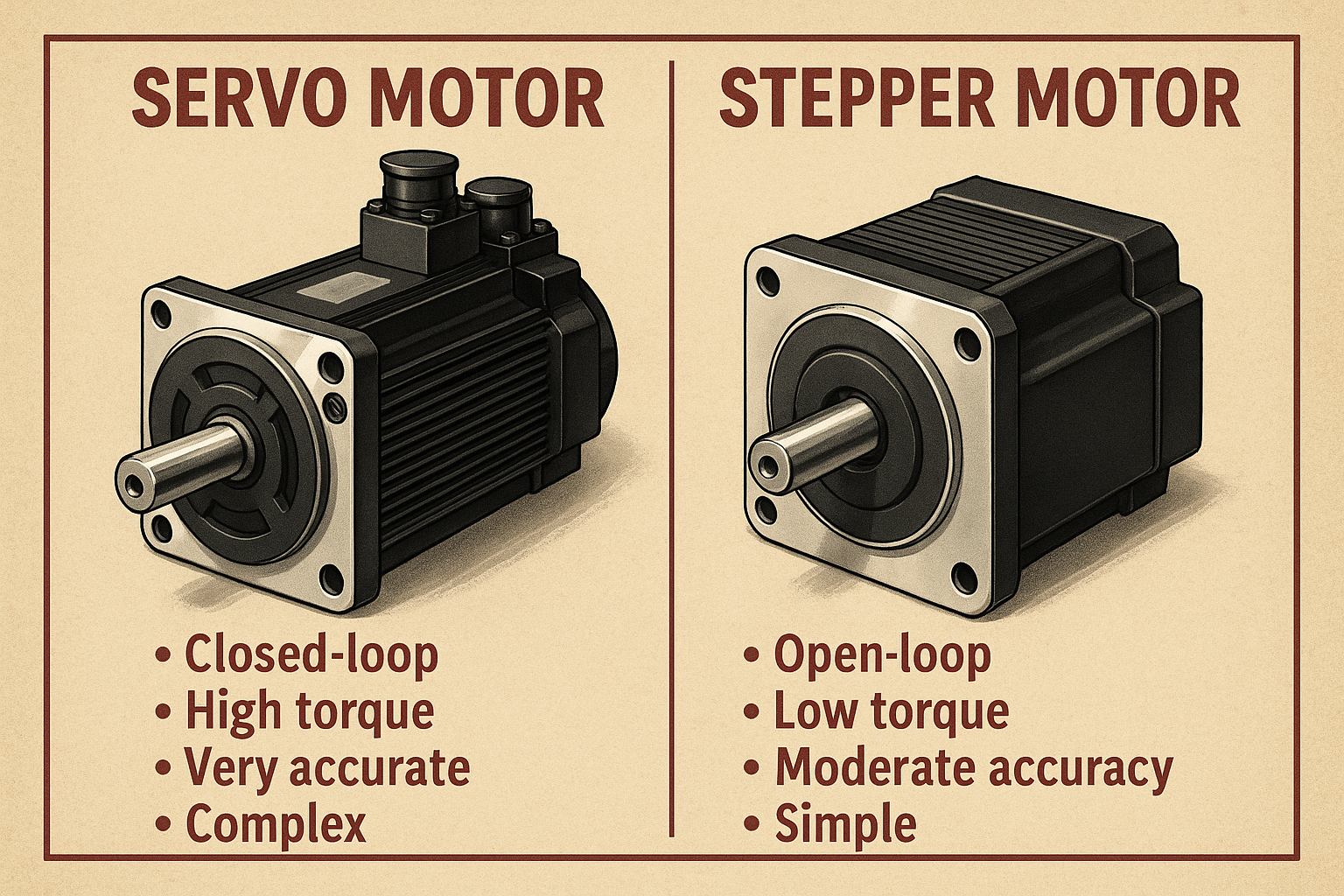
Servomotor vs. motor convencional (ejemplo de motor paso a paso)
| Característica | Servomotor | Motor paso a paso (ejemplo de motor regular) |
|---|---|---|
| Control | Circuito cerrado con retroalimentación del codificador | Circuito abierto, sin retroalimentación |
| Precisión | Extremadamente alto | Moderado, riesgo de pérdida de paso |
| Capacidad de sobrecarga | Fuerte, maneja par máximo | Débil, se detiene bajo sobrecarga |
| Rendimiento de velocidad | Excelente estabilidad a alta velocidad. | Pierde par a alta velocidad |
| Suavidad | Muy suave a bajas velocidades. | Vibración a baja velocidad |
| Respuesta | Rápido y dinámico | Inicio/parada más lentos y retrasados |
| Costo | Más alto | Más bajo |
¿Cuál es la diferencia entre un servomotor y un motor normal?
En resumen: los servomotores son Impulsado por la retroalimentación, preciso y potente, mientras que los motores regulares son más simples pero menos precisos.
Guía de selección de maquinaria de envasado específica para cada aplicación
Eje de aplicación | Requisito clave | Característica de servo recomendada |
Extracción de película VFFS | Longitud de bolsa precisa y repetible; alta aceleración/desaceleración. | Codificador de alta resolución; Alto par máximo; Adaptación de inercia. |
Alimentación/entrada de película HFFS | Movimiento sincronizado con transportador de producto. | Funciones de engranajes/levas electrónicos en el accionamiento. |
Accionamiento de la mordaza de sellado | Alto torque para presión de sellado; Apertura/cierre rápido y preciso. | Alto par máximo; Opción de freno para mordazas verticales. |
Llenadora volumétrica/de barrena | Ángulo de rotación preciso para una dosificación exacta. | Codificador absoluto para memoria de posición después de una pérdida de energía. |
Soporte para desenrollar/rebobinar | Control constante de tensión de la película. | Modo de control de par en el servoaccionamiento. |
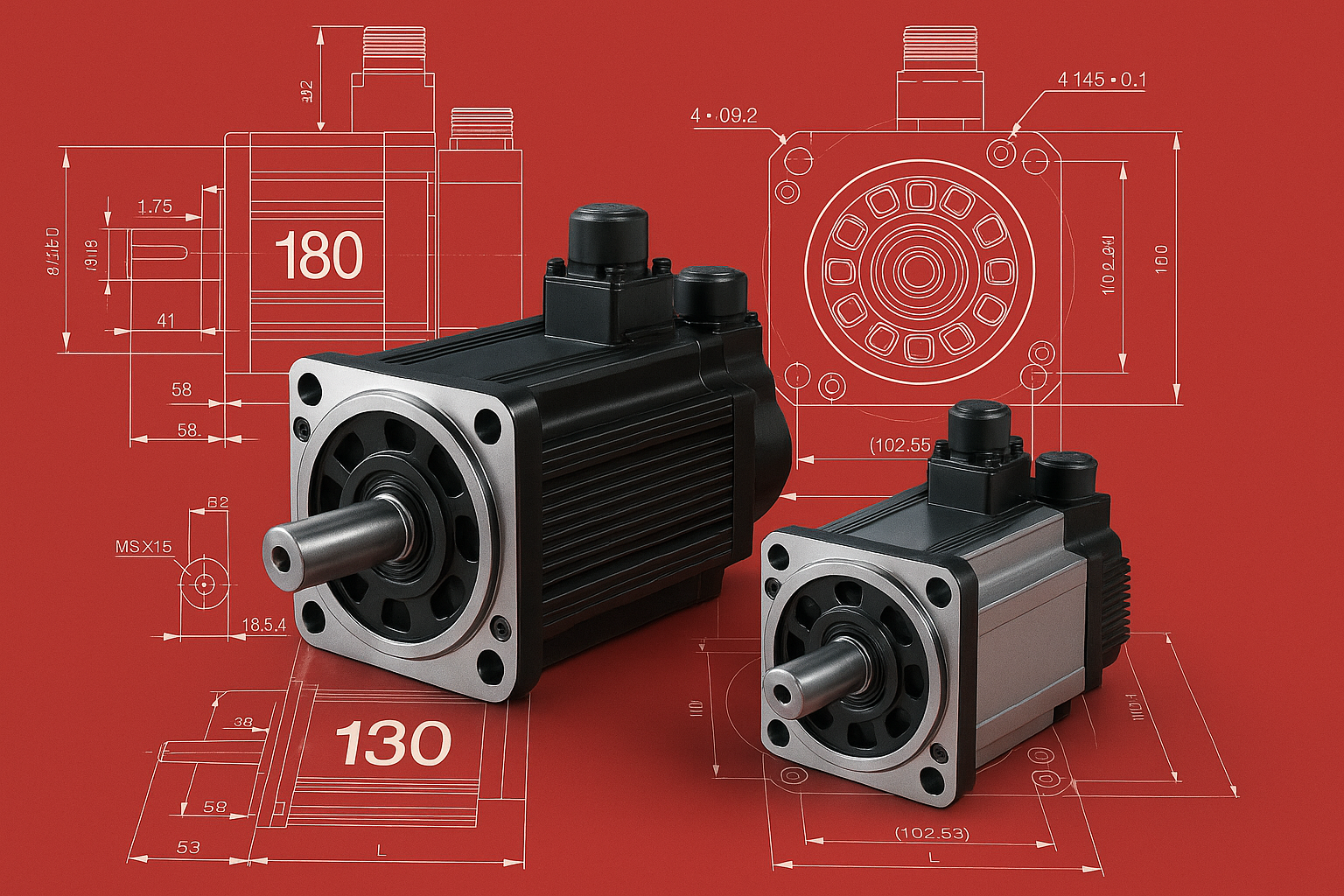
Especificaciones del servomotor (aspectos destacados de las series 130 y 180)
Serie 130 (Par medio, alta precisión)
- Rango de potencia: 1,5 – 3,9 kW
- Par nominal: 5 – 15 Nm
- Velocidad nominal: 1500 – 3000 rpm
- Ideal para: Equipos CNC, líneas de automatización
Serie 180 (servicio pesado, alta potencia)
- Rango de potencia: 2,7 – 7,5 kW
- Par nominal: 17 – 48 Nm
- Velocidad nominal: 1000 – 2000 rpm
- Ideal para: máquinas herramienta grandes, brazos robóticos pesados, equipos industriales
Especificaciones generales:
- Clase de aislamiento: B (130°C)
- Clase de protección: IP65
- Codificador: 2500 PPR Incremental (Absolutamente opcional)
- Voltaje: CA 220 V / 380 V
Mantenimiento del servomotor y fallas comunes
Mantenimiento preventivo
- Mantenga limpia la superficie del motor y asegúrese de que los puertos de ventilación estén despejados.
- Revise y apriete periódicamente las conexiones del cable.
- Monitoree la rotación del eje para detectar resistencia inusual.
- Lubrique los cojinetes según las instrucciones del fabricante.
- Mantenga las condiciones de instalación secas y libres de vibraciones.
Fallas comunes y soluciones
| Problema | Posible causa | Solución |
|---|---|---|
| El motor no arranca | Fallo de energía, error de cableado, controlador no habilitado, freno no liberado | Verifique la energía, vuelva a cablear correctamente, habilite el controlador, suelte el freno |
| Vibración o ruido | Acoplamientos desalineados, tornillos flojos, ajustes de ganancia demasiado altos | Alinear, apretar, ajustar la ganancia |
| Calentamiento excesivo | Sobrecarga, ventilación bloqueada, fricción del cojinete | Reducir la carga, limpiar el motor, comprobar los cojinetes. |
| Errores de posicionamiento | Fallo del codificador, baja ganancia, juego mecánico | Inspeccionar el codificador, ajustar la ganancia, corregir el juego |
| Códigos de alarma | Sobretensión/subtensión, sobrecorriente, fallo del codificador | Estabilizar la potencia, reducir la carga, verificar el codificador. |
Nota de seguridad: Desconecte siempre la alimentación antes de realizar tareas de mantenimiento. En caso de averías complejas (p. ej., cortocircuitos en los devanados), contacte con un servicio técnico profesional.

- Fallos comunes y solución de problemas
Problema | Posible causa | Solución |
Errores de posicionamiento | Falla del codificador; Configuración de ganancia baja; Juego mecánico en correas/engranajes. | Inspeccione el codificador y los cables; vuelva a ejecutar el ajuste automático para aumentar la ganancia; inspeccione y ajuste los componentes de transmisión mecánica. |
Calentamiento excesivo | Sobrecarga continua; Ventilación bloqueada; Temperatura ambiente alta. | Verificar el tamaño del motor; limpiar la superficie del motor; garantizar una refrigeración adecuada del gabinete. |
Vibración o ruido | Acoplamientos desalineados; Configuraciones de alta ganancia; Resonancia mecánica. | Realinear el eje del motor a la carga; reducir la ganancia manualmente o volver a ajustar; activar los filtros de muesca en el variador. |
Códigos de alarma del conductor | Sobretensión, sobrecorriente, fallo del codificador. | Verifique la calidad de la energía entrante; reduzca las tasas de aceleración o verifique el tamaño del motor; inspeccione el cable del codificador para detectar daños o conexiones sueltas. |
Producto relacionado

Los servomotores son los El corazón del control de movimiento de precisión, lo que permite a las industrias lograr automatización, velocidad y confiabilidad. Ya sea que necesite un servomotor de CC Para un control sencillo, un Servomotor industrial de CA para automatización de trabajo pesado, o una mini servomotor Para la robótica compacta, tenemos la solución adecuada.
.
Esto significa que la posición real del motor está muy por detrás de la posición ordenada.
Posibles causas y soluciones:
1. Problema de transmisión de la señal
Causa: Cableado incorrecto, cables de alimentación/codificador dañados o conexiones deficientes que provocan pérdida de señal.
Solución: Verifique nuevamente el cableado según el diagrama, inspeccione los cables para detectar daños y vuelva a insertar los conectores para garantizar un contacto adecuado.
2. Limitaciones de respuesta del sistema
Causa: Ganancia del servo baja, tiempo de aceleración/desaceleración demasiado corto o carga excesiva.
Solución:
Aumente la posición y la ganancia del bucle de velocidad o utilice el ajuste automático de ganancia.
Prolongar el tiempo de aceleración/desaceleración (se recomienda curva S).
Diagnóstico paso a paso:
- Comprobar la fuente del comando – Asegúrese de que el controlador (por ejemplo, PLC) esté realmente enviando pulsos (luz indicadora parpadeando).
- Verificar el cableado – Confirme que los cables de alimentación, control y codificador estén conectados correctamente y libres de daños.
- Comprobar el freno – Para los modelos equipados con freno, asegúrese de que la bobina del freno esté energizada y liberada.
- Modo de control – Asegúrese de que el conductor esté en modo de control de posición, ni modo de torque o velocidad.
- Coincidencia de tipo de pulso – Confirme que el tipo de pulso (pulso + dirección o cuadratura A/B) coincida con la configuración del controlador.
Posibles causas:
Problema con el cable de alimentación
- Causa: Conexión de fase suelta (U, V, W) que provoca corriente anormal.
- Solución: Vuelva a apretar todas las conexiones de alimentación del motor.
Oscilación del sistema
- Causa: Ganancia excesiva del bucle de velocidad, lo que produce vibraciones incluso en parada.
- Solución: Reducir la ganancia o volver a ejecutar el ajuste automático.
Bloqueo mecánico
Causa: Cojinetes dañados u objetos extraños que atascan el eje.
Solución: Apague el motor y gire el eje manualmente. Si la resistencia es alta, inspeccione y repare el motor.
Causas y soluciones:
Interferencia electromagnética
- Verifique si el blindaje del cable de alimentación y del codificador está conectado a tierra correctamente.
- Evite pasar los cables del codificador junto a líneas de inversor de alto voltaje.
Configuración de parámetros
- Reduzca la ganancia del bucle de posición si está configurada demasiado alta.
- Aumente la “tolerancia en posición” para que el motor no se microajuste infinitamente.
Problemas mecánicos
Inspeccionar acoplamientos, alineación y equilibrio de carga.
- Par de inercia de carga: T=J×αT = J × α (J = inercia, α = aceleración angular).
- Par de fricción:Para vencer la resistencia mecánica.
- Par de gravedad:Para ejes verticales (eje Z).
- Fuerzas externas:Como la fuerza de corte.
- Regla de oro: Agregue un margen de seguridad de 20–30% después de los cálculos.
- Definición: Relación entre la inercia de la carga y la inercia del rotor del motor.
- Importancia: Si la relación es >10:1, la respuesta se vuelve lenta y se producen sobreimpulsos y vibraciones.
- Proporción ideal: ≤5:1 para un mejor rendimiento.
- Solución: Utilice una caja de cambios o una inercia mayor. servomotor Si se produce una discrepancia.
Codificador incremental: Emite posición relativa; requiere volver al punto de origen después del encendido.
Codificador absoluto: Recuerda la posición absoluta incluso después de una pérdida de energía; no requiere retorno al punto de origen.
¿Cuál elegir?
- Utilice el modelo incremental si el retorno al origen es sencillo y el costo es crítico.
- Utilice absoluto si el tiempo de inactividad y la precisión son críticos (por ejemplo, robótica, sistemas multieje).
Cables de alimentación: Se puede extender pero requiere un calibre más grueso para minimizar la caída de voltaje.
Cables del codificador: Muy sensible; evite extender la señal más allá de 20 m. Utilice par trenzado blindado y considere la posibilidad de usar amplificadores/filtros si es necesario.
Sí. Una conexión a tierra adecuada garantiza la seguridad y minimiza las interferencias.
Terminal PE del motor → conectar al PE del controlador con un cable corto y grueso.
Terminal PE del controlador → conectar a la barra de tierra del gabinete.
Blindaje de cable → conexión a tierra únicamente en el lado del conductor para evitar bucles de tierra.
- Alta rigidez: Respuesta rápida, resiste perturbaciones de carga, pero riesgo de oscilación.
- Baja rigidez: Funcionamiento suave pero menor resistencia a las perturbaciones.
Ajuste: Aumente gradualmente la ganancia del bucle hasta lograr una respuesta óptima sin vibraciones. Utilice el ajuste automático de ganancia del controlador si está disponible.
Causa: El servo aplica continuamente pequeñas corrientes correctivas para mantener la posición (“ruido del servo”).
Correcciones:
Configuraciones de ganancia de bucle más bajas.
Aplicar filtros de muesca para frecuencias de resonancia.
Aumente la “tolerancia en posición” para que el sistema no corrija demasiado.
Los servomotores compactos se utilizan a menudo en Modelos RC, drones y robótica educativa.
Consulte el manual del producto para obtener información completa. especificaciones del servomotor, incluido Detalles de los pines del servomotor, principio de funcionamiento y diagramas de cableado..