

Introducción a los motores paso a paso
A motor paso a paso es un motor eléctrico síncrono sin escobillas diseñado para dividir una rotación completa en un gran número de pasos iguales. Su construcción Generalmente incluye:Estator: Equipado con múltiples bobinas electromagnéticas dispuestas en fases.Rotor: Un diseño de imán permanente o de reluctancia variable con polos dentados finos.Circuito de accionamiento (controlador): Envía pulsos temporizados a las bobinas del estator, creando un campo magnético giratorio.
Cada pulso entrante gira el eje en un ángulo de paso fijo (comúnmente 1,8° o 0,9°). Al controlar el número y la frecuencia de estos pulsos, los motores paso a paso logran control preciso de posición y velocidad sin necesidad de sensores de retroalimentación en sistemas de circuito abierto.
Ventajas clave:Exactitud: Ideal para aplicaciones que requieren movimiento repetible;Control simple: Posición y velocidad directamente proporcionales a los pulsos de entrada;Fiabilidad: Sin escobillas = menor desgaste y mantenimiento.
Aplicaciones típicas: Impresoras 3D, Máquinas CNC, Robótica, comida Máquinas de embalaje y etiquetado .Etc
En resumen, los motores paso a paso son los columna vertebral de la automatización moderna, ofreciendo un equilibrio rentable entre Precisión, durabilidad y simplicidad de control.

¿Para qué se utiliza un motor paso a paso?
A motor paso a paso Es un motor de CC sin escobillas que convierte señales de pulsos digitales en un desplazamiento angular mecánico preciso. Cada pulso de entrada hace que el eje gire en un ángulo fijo, llamado "paso". Este movimiento paso a paso permite una excelente Precisión de posicionamiento, control de velocidad y repetibilidad.
Aplicaciones comunes:
- Máquina empaquetadora: Máquinas para envasar alimentos, Pesadora multicabezal, Transportadores ...
- Impresoras 3D: Controle con precisión el movimiento del cabezal de impresión y de la cama.
- Máquinas CNC: Herramientas de accionamiento para cortes y tallados precisos.
- Robótica: Consiga una rotación articular precisa.
- Máquinas médicas: Asegúrese de que el posicionamiento de las muestras sea preciso en analizadores y escáneres.

Principio de funcionamiento del motor paso a paso
El principio de un motor paso a paso se basa en electromagnetismo y control paso a pasoCada vez que se recibe una señal de pulso de entrada, el motor gira en un ángulo fijo (conocido como “ángulo de paso”).
- Excitación electromagnética: El controlador energiza un conjunto de bobinas del estator, creando un campo magnético.
- Alineación del rotor: El rotor (un imán permanente dentado) se alinea con los dientes del estator energizados.
- Conmutación secuencial: El controlador desenergiza la bobina de corriente y luego energiza la siguiente, desplazando el campo del estator.
- Movimiento paso a paso: El rotor se mueve paso a paso, siguiendo el campo magnético giratorio.
- Frecuencia de pulso = Velocidad
- Recuento de pulsos = Posición
Esto hace que control de velocidad del motor paso a paso y un control de posición sencillo, altamente repetible y preciso.
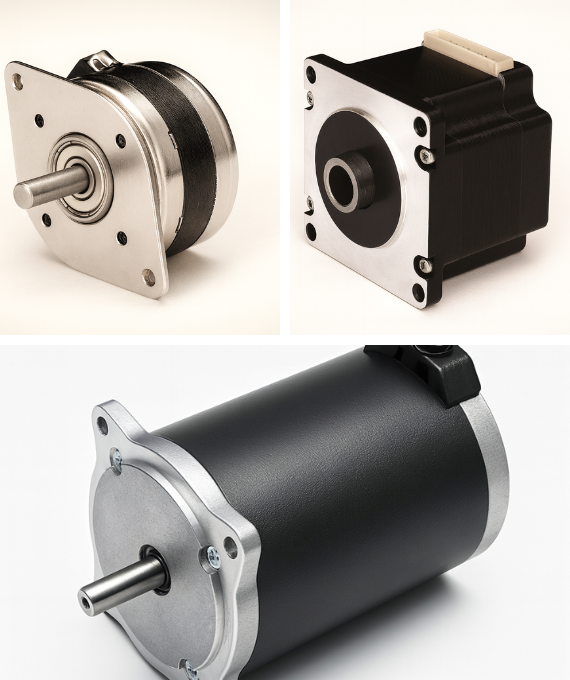
Tipos de motores paso a paso
1. Motores paso a paso estándar bifásicos, trifásicos y pentafásicos
- Descripción: La base de nuestra línea de productos. Más fases = un rendimiento más fluido.
- Ideal para: Máquinas automáticas para alimentos, máquinas CNC, textiles y equipos de embalaje.
2. Motor paso a paso de bucle cerrado con controlador
- Descripción: Equipado con un codificador de alta precisión para retroalimentación en tiempo real. Elimina la pérdida de paso y mantiene las ventajas de costo de los motores paso a paso.
- Ideal para: Aplicaciones que requieren confiabilidad absoluta y tolerancia cero ante pasos omitidos.
3. Motores paso a paso integrados (motor + controlador)
- Descripción: Combina el motor paso a paso y el controlador en una unidad compacta. Simplifica el cableado, reduce las interferencias electromagnéticas y ahorra espacio.
- Ideal para: Sistemas de control distribuido y diseños de equipos compactos.
4. Motores paso a paso para aplicaciones especiales (eje hueco/con freno)
- Eje hueco: Permite el paso de cables a través del motor, simplificando los diseños.
- Con freno: Garantiza la seguridad en condiciones de movimiento vertical o sin energía.
- Ideal para: Robótica, ascensores y desafíos únicos de automatización.
Motor paso a paso vs. servomotor
Una de las preguntas más comunes en el control de movimiento es: ¿Cuál es la diferencia entre un servomotor y un motor paso a paso?
| Característica | Motor paso a paso | Servomotor |
|---|---|---|
| Método de control | Bucle abierto por defecto; también puede ser de bucle cerrado con un codificador | Siempre en bucle cerrado con retroalimentación del codificador |
| Costo | Sistema simple y de menor costo | Sistema complejo y de mayor costo |
| Rendimiento a baja velocidad | Un par alto a baja velocidad puede mostrar vibración | Muy suave y estable a baja velocidad. |
| Rendimiento de alta velocidad | El par disminuye a velocidades más altas | Mantiene el par nominal incluso a alta velocidad. |
| Capacidad de sobrecarga | Sin tolerancia a sobrecargas: puede omitir pasos | Fuerte capacidad de sobrecarga (hasta 3 veces el par nominal) |
| Respuesta | Inicio/parada rápidos | Respuesta dinámica más rápida |
| Mejor uso | Posicionamiento preciso, velocidad constante, sensible a los costos. | Movimiento altamente dinámico, carga pesada, tareas con alto par motor |
Conclusión:
Elige uno motor paso a paso para posicionamiento preciso y rentabilidad.
Elige uno servomotor para entornos de alta velocidad, alto par o propensos a sobrecargas.
Especificaciones técnicas principales
| Parámetro | Descripción | Por qué es importante |
|---|---|---|
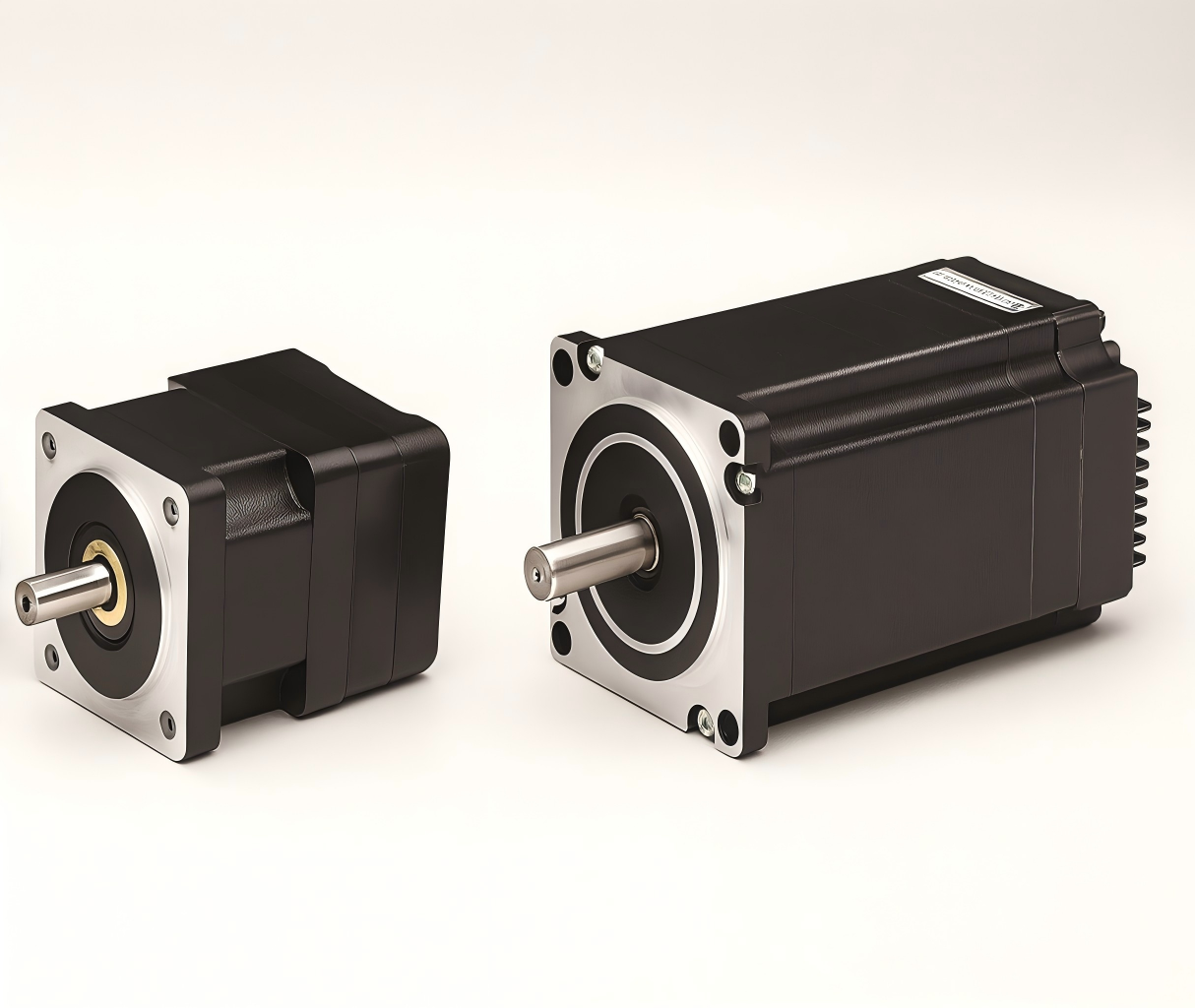
| Tamaño del marco | Dimensiones de la brida del motor | Determina la compatibilidad de la instalación; tamaños más grandes = mayor torque |
| Par de retención | Fuerza de retención estática | Garantiza la estabilidad de la carga. |
| Ángulo de paso | Movimiento angular por paso | Ángulo más pequeño = mayor precisión |
| Corriente de fase | Corriente de adaptación del controlador | Impacta el par y el calentamiento |
| Longitud del cuerpo | Tamaño del cuerpo del motor | Cuerpo más largo = más torque en el mismo tamaño de cuadro |
| Fases | 2, 3 o 5 | Más fases = funcionamiento más fluido |
Estructura interna de los motores paso a paso
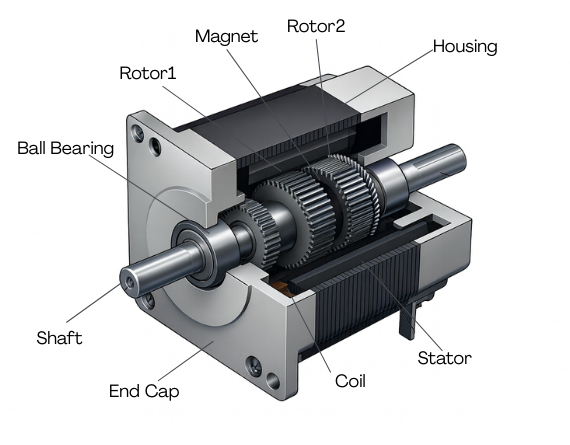
El movimiento preciso de motores paso a paso viene de ellos Estructura mecánica y electromagnética robustaCada motor paso a paso de alta calidad se construye con una artesanía meticulosa, diseñado para convertir pulsos digitales en movimiento físico confiable. Un típico motor paso a paso híbrido Se compone de tres grandes asambleas que trabajan en armonía:
Rotor (núcleo giratorio):
- Imán permanente: Proporciona el campo magnético base, esencial para la generación de torque.
- Núcleo del rotor: Láminas de acero al silicio laminado con microdientes finamente mecanizados. Estos dientes interactúan con el campo del estator para generar un movimiento escalonado.
- Eje: Transmite el movimiento rotatorio a la carga externa.
- Rodamientos de bolas: Montado en ambos extremos del eje, lo que permite una rotación suave y con baja fricción incluso a alta velocidad.
Estator (parte estacionaria):
- Núcleo del estator: Construido en acero laminado al silicio, con múltiples postes grandes alrededor de su pared interior.
- Bobinados (bobinas): Alambres de cobre de alta pureza enrollados alrededor de cada polo. Al energizar estos devanados secuencialmente, se crea un campo magnético giratorio que impulsa el rotor paso a paso.
Tapas de extremo (carcasa):
- Tapas de los extremos delantero y trasero: Generalmente fabricados en aleación de aluminio o acero de alta resistencia, encierran con precisión el rotor y el estator mientras mantienen los cojinetes en su lugar.
- Tapa del extremo delantero (brida de montaje): Determina el tamaño del bastidor estandarizado del motor.

- Especificaciones del motor paso a paso
- Control de velocidad del motor paso a paso
- Cableado del motor paso a paso
| Especificaciones eléctricas | Especificaciones mecánicas | ||
|---|---|---|---|
| Precisión del ángulo de paso | ±5% | Rigidez dieléctrica | CA 500 V, 1 minuto |
| Temperatura ambiente | -20℃ ~ +50℃ (sin congelación) | Resistencia de aislamiento | 100 MΩ mín. a 500 V CC |
| Otras especificaciones | Juego radial | 0,02 mm máx. (carga de 500 g) | |
| Temperatura máxima permitida | 80℃ | Juego axial | 0,08 mm máx. (carga de 500 g) |
| Clase de aislamiento | Clase B |
Explicación de términos:
- Precisión del ángulo de paso: La tolerancia en el ángulo de paso del motor (por ejemplo, 1,8° ±5%).
- Temperatura máxima permitida: La temperatura máxima segura del cuerpo del motor durante el funcionamiento.
- Temperatura ambiente: El rango aceptable de temperatura del aire circundante donde opera el motor.
- Clase de aislamiento: Una clasificación (la clase B es común) que define la tolerancia térmica del sistema de aislamiento del motor.
- Rigidez dieléctrica (prueba Hi-Pot): La capacidad del aislamiento para soportar un potencial de alto voltaje entre los devanados y el bastidor del motor sin romperse.
- Resistencia de aislamiento: Una medida de la resistencia del aislamiento entre los devanados y el bastidor del motor.
- Juego radial: El movimiento máximo permitido (juego) del eje cuando se aplica una fuerza perpendicular al eje del eje.
- Juego axial: El movimiento máximo permitido (juego) del eje cuando se aplica una fuerza a lo largo del eje del eje.
Los motores paso a paso giran a una velocidad proporcional a la frecuencia de los pulsos de entradaPara una aceleración y desaceleración suaves, necesita un controlador capaz de ajustar con precisión la frecuencia de pulso.
Nuestros conductores apoyan micropasos hasta 256 subdivisiones, permitiendo un movimiento ultra suave incluso a velocidades muy bajas.
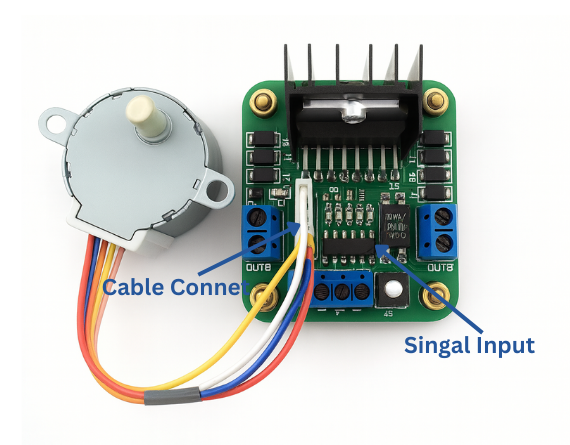
Correcto alambrado es esencial para el rendimiento.
Cableado bipolar (4 cables): Proporciona un mayor torque y requiere controladores más complejos.
Cableado unipolar (5 o 6 cables): Más sencillo de conducir y con un par ligeramente menor.
Nosotros proporcionamos diagramas de cableado claros y soporte técnico para garantizar una integración perfecta.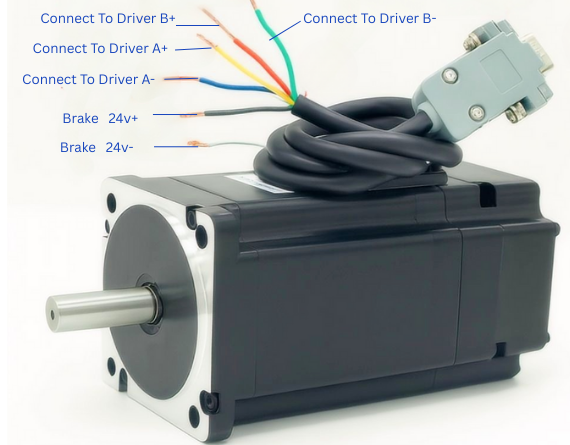
Producto relacionado



¿Listo para impulsar su próximo proyecto?
Nuestro equipo de ingeniería está listo para apoyar su proyecto desde la selección del motor hasta la integración completa.
📞 Línea directa técnica: +0086-13536680274
📧 Email:[email protected]
💬 Formulario en línea: https://fill-package.com/contact-us/
Vamos a traer movimiento preciso y potente a su sistema.
.
Los motores paso a paso son dispositivos alimentados por CCNo se pueden alimentar directamente desde una fuente de alimentación de CC sin procesar, sino que requieren una controlador/controlador de motor paso a paso, que traduce los pulsos de entrada en secuencias precisas de energización de la bobina.
La mayoría de los sistemas funcionan desde un suministro de CC regulado, típicamente 24 V a 48 V, aunque los modelos industriales pueden admitir rangos más amplios.
Esta es la pregunta de selección más común.
Método de control: Los motores paso a paso generalmente funcionan en control de lazo abierto (sin retroalimentación), lo que simplifica el sistema y lo hace más económico. Los servomotores deben ser... circuito cerrado con retroalimentación del codificador, lo que los hace más complejos y costosos.
Actuación: Los motores paso a paso proporcionan alto par a bajas velocidades, pero el par disminuye a velocidades más altas y no pueden soportar la sobrecarga. Los servomotores mantienen Par estable en todo el rango de velocidad y tienen una fuerte capacidad de sobrecarga.
Solicitud: Elige uno motor paso a paso Si su aplicación lo requiere Posicionamiento rentable y preciso con cargas establesElige uno servomotor Si su proyecto lo requiere Respuesta dinámica muy alta, control de velocidad o par.
Nuestra solución: Nuestro serie de motores paso a paso de bucle cerrado Combina los beneficios de ambos: confiabilidad similar a la de un servomotor a un costo mucho menor.
El par de retención es el par máximo que un motor puede proporcionar cuando está energizado pero no gira. Es un indicador clave de rendimiento de cuánta “fuerza” puede soportar el motor.
- Un par de retención mayor es mejor, pero sólo dentro de lo razonable.
- Sobreespecificar el par aumentará costo, tamaño y consumo de energía innecesariamente.
- La mejor práctica es calcular el torque máximo necesario para su aplicación y seleccionar un motor con un Margen de seguridad 30–50%.
- Bucle abierto: El controlador solo envía comandos de pulso sin comprobar si el motor ha alcanzado la posición. Simple y económico, ideal para la mayoría de las aplicaciones básicas.
- Circuito cerrado: El motor tiene un codificador que proporciona retroalimentación en tiempo real. El conductor compara la posición de comando con la posición real, corrigiendo cualquier error inmediatamente. Esto mejora drásticamente precisión y fiabilidad, especialmente bajo cargas pesadas
- Dos fases: El más común y rentable, adecuado para la automatización general.
- Trifásico: Proporciona un movimiento más suave y una vibración más baja en comparación con el modelo de dos fases.
- Cinco fases: Entrega el funcionamiento más suave y silencioso, con resonancia reducida, ideal para aplicaciones de alta precisión.
- Velocidad: Se determina por la frecuencia del pulso (pulsos por segundo). A mayor frecuencia, mayor velocidad.
- Dirección: Controlado por una línea de señal de dirección (pin DIR, nivel alto/bajo).
- Ángulo: Se determina por el número total de pulsos. A mayor número de pulsos, mayor ángulo de rotación.
El micropaso es una técnica de accionamiento que subdivide el paso completo de un motor (por ejemplo, 1,8°) en muchos pasos más pequeños.
Mayor resolución: Permite un posicionamiento mucho más fino.
Movimiento más suave: Reduce la vibración y el ruido a baja velocidad.
Nuestros conductores dan soporte hasta 256 micropasos por paso Para un rendimiento ultra suave.
Sí-Es obligatorio tener un conductorUn motor paso a paso no puede funcionar conectándolo directamente a una fuente de CC. El controlador convierte las señales de control (pulsos y dirección) en la sincronización y corriente correctas para las bobinas del motor.
Sí, el calentamiento es normal. Los motores paso a paso siguen consumiendo corriente incluso estando parados para mantener el par motor.
El funcionamiento seguro es posible hasta Temperatura superficial de 80 °C.
El calor excesivo puede indicar ajustes de sobrecorriente en el conductor.
Nuestro motores paso a paso de circuito cerrado e integrados incluir control de corriente inteligente, reduciendo el calentamiento innecesario y mejorando la eficiencia.
La pérdida de paso se produce cuando el motor no puede seguir las órdenes de entrada. Las razones más comunes incluyen:
- Par de carga que excede la capacidad del motor.
- Tasas de aceleración/desaceleración configuradas de forma demasiado agresiva.
- La corriente del controlador es demasiado baja.
- Atasco mecánico en el sistema de transmisión.
- Tensión de alimentación demasiado baja, especialmente a alta velocidad.
Una de las principales ventajas de los motores paso a paso es bajo mantenimiento:
- Sin escobillas → desgaste mínimo.
- Sólo asegúrese superficies limpias y buena ventilación.
- Revise periódicamente el cableado y los conectores.
- Controle los cojinetes para detectar ruidos inusuales después de un uso prolongado.
- Evite ambientes corrosivos o extremos.