
Суть точности в современной автоматизации
Что такое серводвигатель?
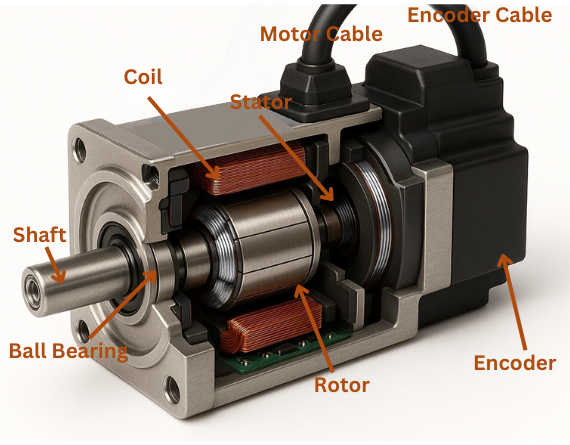
А серводвигатель это двигатель, предназначенный для точное управление положением, скоростью и крутящим моментомВ отличие от обычных двигателей, он работает как замкнутая система управления, в состав которого входят: мотор сам по себе, А устройство обратной связи (обычно кодировщик),A драйвер/контроллер сервопривода.
Основное преимущество сервосистемы заключается в ее механизм обратной связи и коррекцииОн непрерывно сравнивает фактическое движение (по сигналам энкодера) с заданными командами и мгновенно корректирует отклонения. Это обеспечивает высочайшую точность, делая его незаменимым в отраслях, где точность не имеет значения.
Определение серводвигателя: Серводвигатель — это исполнительный механизм, который точно «следует» командным сигналам для выполнения точного управления движением.
В вашей упаковочной машине наблюдаются следующие неисправности, связанные с управлением?
Проблема 1: Несоответствие длины пакета и неточные места запайки/разреза.
- Наши сервомоторы оснащены Энкодеры с разрешением 2500 импульсов на оборот (PPR) или выше.обеспечивая чрезвычайно точную обратную связь по положению.
- Встроенный сервопривод оснащен передовыми алгоритмами, позволяющими выполнять сложные профили движения со временем отклика менее миллисекунды, обеспечивая остановку ремней для натяжения пленки или зажимных губок в точно заданном положении цикл за циклом.
Проблема 2: Частые срабатывания сигнализации «Переполнение счетчика отклонений».
- Наши серводвигатели переменного тока обеспечивают высокий пиковый крутящий момент (до 3-кратного номинального крутящего момента), что позволяет им справляться с высокими нагрузками на механизмы протяжки и запайки пленки, требующими интенсивного ускорения и замедления.
- Сервоприводы имеют интеллектуальные функции автоматической настройки которые автоматически измеряют инерцию нагрузки и оптимизируют коэффициенты усиления контура управления. Это гарантирует, что двигатель сможет точно следовать командам без запаздывания, даже при динамических изменениях нагрузки.
Проблема 3: Чрезмерная вибрация и шум во время работы.
- Мы предлагаем идеально подобранные пары двигателей и приводов, прошедшие заводскую настройку для плавной и бесшумной работы.
- В состав приводов входят адаптивные режекторные фильтры способный автоматически обнаруживать и подавлять частоты механического резонанса, устраняя вибрацию и шум в источнике.
Проблема 4: Перегрев двигателя и преждевременный выход из строя.
- Мы поможем вам правильно подобрать серводвигатель на основе тщательного анализа требований к крутящему моменту, скорости и инерции вашего приложения, обеспечивая работу двигателя в пределах допустимого диапазона непрерывной нагрузки.
- Наши двигатели имеют высококачественную изоляцию (класс B или выше) и оптимизированные охлаждающие ребра, что обеспечивает превосходное рассеивание тепла и длительный, надежный срок службы.
Принцип работы серводвигателя
The принцип работы серводвигателя основано на управление с обратной связью в замкнутом контуре:
- Ввод команды: ПЛК или контроллер движения отправляет водителю команды положения, скорости или крутящего момента.
- Сравнение: Сервопривод сравнивает эти сигналы с обратной связью энкодера в реальном времени.
- Усиление мощности: На основе отклонений драйвер регулирует напряжение и ток на катушках.
- Вращение двигателя: Двигатель создает крутящий момент и вращает вал.
- Исправление обратной связи: Кодер обнаруживает фактическое движение и отправляет данные обратно.
- Непрерывная корректировка: Цикл повторяется до тех пор, пока двигатель не достигнет точной целевой точки.
(См. наш схема серводвигателя (для наглядного объяснения.)
Этот постоянный цикл гарантирует, что двигатель сохраняет точность даже в условиях помех, таких как изменение нагрузки.
Серводвигатель переменного тока против серводвигателя постоянного тока
Серводвигатели можно классифицировать следующим образом:
Серводвигатель постоянного тока – Простая конструкция, более легкое управление, исторически распространено в маломощных системах.
Серводвигатель переменного тока – Доминирует в современной промышленности, особенно Синхронные двигатели с постоянными магнитами (СДПМ). Они обеспечивают более высокую эффективность, большую плотность крутящего момента, более широкий диапазон скоростей и низкие эксплуатационные расходы.
Ответ на ключевой вопрос: Серводвигатель переменного или постоянного тока?
Оба существуют, но в промышленной автоматизации Серводвигатели переменного тока являются стандартным выбором.
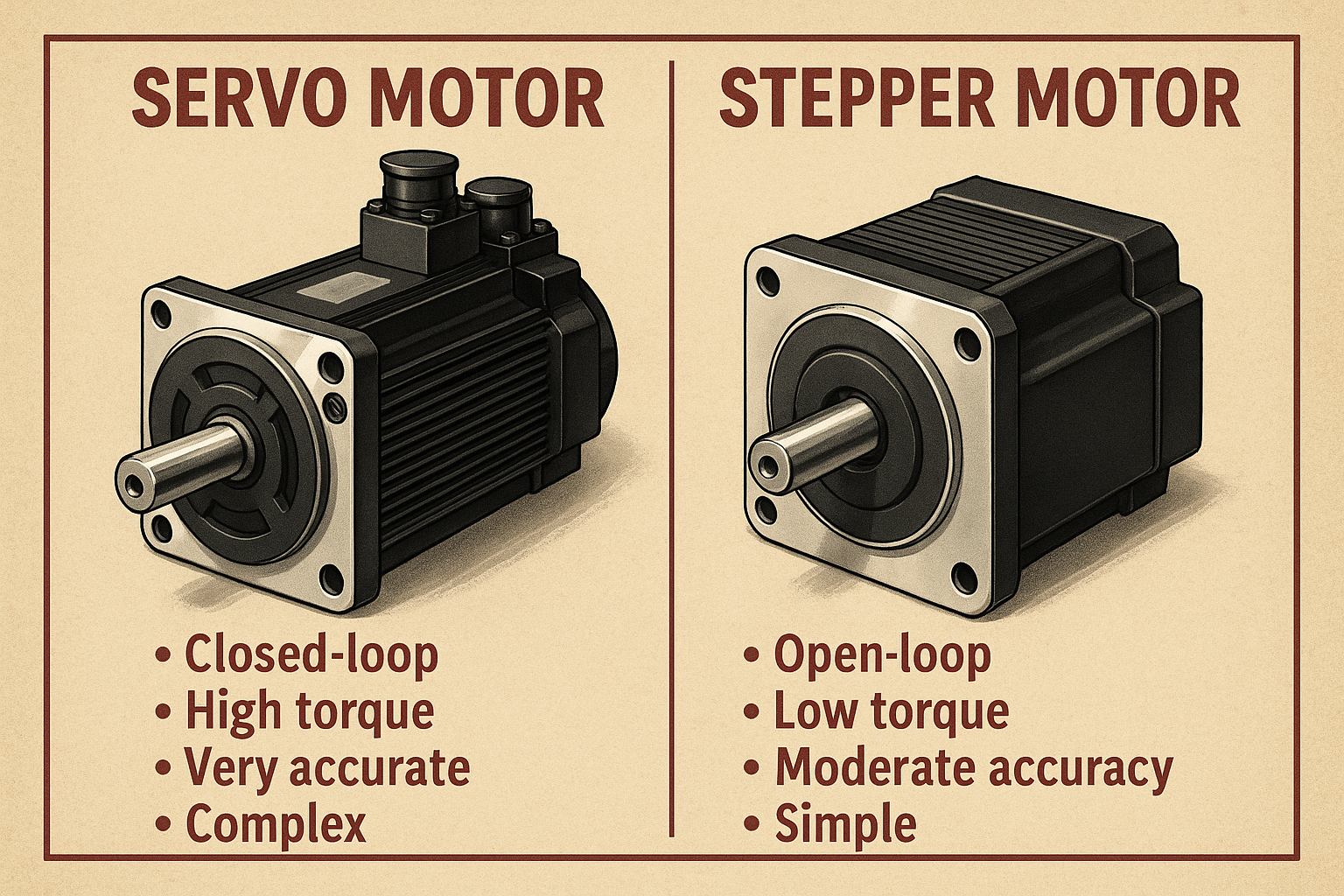
Серводвигатель против обычного двигателя (пример шагового двигателя)
| Особенность | Серводвигатель | Шаговый двигатель (пример обычного двигателя) |
|---|---|---|
| Контроль | Замкнутый контур с обратной связью от энкодера | Открытый контур, без обратной связи |
| Точность | Чрезвычайно высокий | Умеренный, риск потери шага |
| Перегрузочная способность | Прочный, выдерживает максимальный крутящий момент | Слабый, глохнет при перегрузке |
| Скорость Производительность | Отличная устойчивость на высоких скоростях | Теряет крутящий момент на высокой скорости |
| Гладкость | Очень плавный на низких скоростях | Вибрация на низкой скорости |
| Ответ | Быстрый и динамичный | Более медленный, отложенный старт/остановка |
| Расходы | Выше | Ниже |
В чем разница между серводвигателем и обычным двигателем?
Короче говоря: серводвигатели — это основанный на обратной связи, точный и мощный, тогда как обычные двигатели проще, но менее точны.
Руководство по выбору упаковочного оборудования с учетом специфики его применения
Ось применения | Ключевое требование | Рекомендуемая функция сервопривода |
Пленочная съемка VFFS | Точная, повторяемая длина мешка; высокая скорость разгона/замедления. | Высокоточный энкодер; высокий пиковый крутящий момент; согласование инерции. |
Подача/ввод пленки HFFS | Синхронизированное движение с конвейером для транспортировки продукции. | Электронные функции переключения передач/кулачкового механизма в приводе. |
Привод уплотнительной губки | Высокий крутящий момент для создания давления герметизации; быстрое и точное открытие/закрытие. | Высокий пиковый крутящий момент; возможность установки тормоза на вертикальные зажимные губки. |
Шнековый/объемный наполнитель | Точный угол поворота для корректного дозирования. | Абсолютный энкодер для запоминания положения после отключения питания. |
Подставка для размотки/намотки | Постоянный контроль натяжения пленки. | Режим управления крутящим моментом в сервоприводе. |
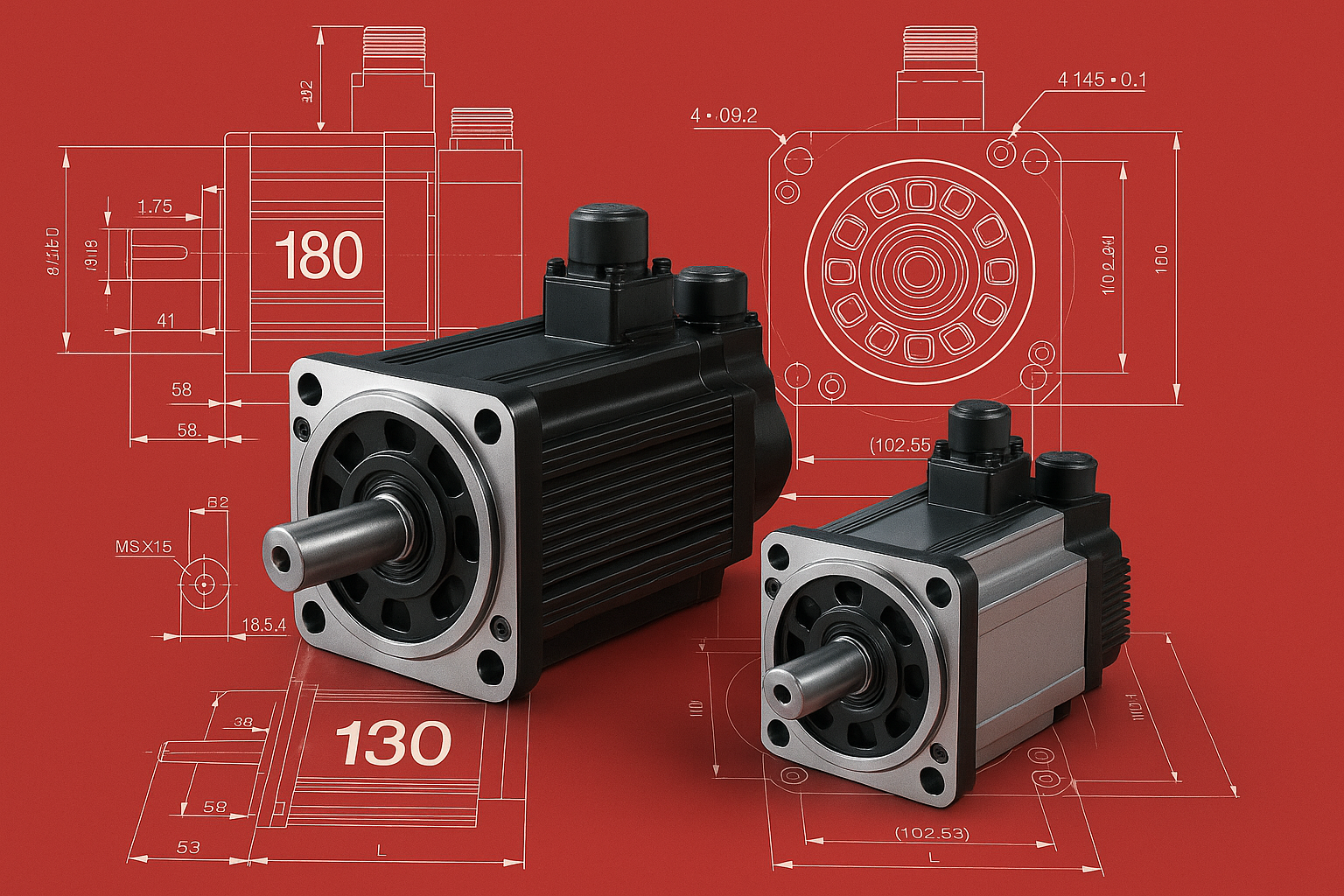
Технические характеристики серводвигателей (основные характеристики серий 130 и 180)
Серия 130 (средний крутящий момент, высокая точность)
- Диапазон мощности: 1,5 – 3,9 кВт
- Номинальный крутящий момент: 5 – 15 Нм
- Номинальная скорость: 1500 – 3000 об/мин
- Идеально подходит для: оборудования с ЧПУ, автоматизированных линий
Серия 180 (тяжелая, высокой мощности)
- Диапазон мощности: 2,7 – 7,5 кВт
- Номинальный крутящий момент: 17 – 48 Нм
- Номинальная скорость: 1000 – 2000 об/мин
- Идеально подходит для: крупных станков, тяжелых роботизированных рук, промышленного оборудования
Общие характеристики:
- Класс изоляции: В (130°С)
- Класс защиты: IP65
- Кодер: 2500 PPR (абсолютно опционально)
- Напряжение: переменный ток 220 В / 380 В
Техническое обслуживание серводвигателя и распространенные неисправности
Профилактическое обслуживание
- Содержите поверхность двигателя в чистоте и следите за тем, чтобы вентиляционные отверстия были свободны.
- Регулярно проверяйте и затягивайте кабельные соединения.
- Следите за вращением вала на предмет необычного сопротивления.
- Смажьте подшипники в соответствии с инструкциями производителя.
- Поддерживайте сухие и свободные от вибраций условия монтажа.
Распространенные неисправности и решения
| Проблема | Возможная причина | Решение |
|---|---|---|
| Двигатель не заводится | Сбой питания, ошибка проводки, драйвер не включен, тормоз не отпущен | Проверьте питание, правильно подключите, включите драйвер, отпустите тормоз. |
| Вибрация или шум | Несоосные муфты, ослабленные винты, слишком высокие настройки усиления | Выровнять, затянуть, отрегулировать усиление |
| Перегрев | Перегрузка, заблокированная вентиляция, трение подшипников | Уменьшите нагрузку, очистите двигатель, проверьте подшипники. |
| Ошибки позиционирования | Неисправность энкодера, низкий коэффициент усиления, механический люфт | Проверить энкодер, настроить усиление, устранить люфт |
| Коды тревоги | Повышенное/пониженное напряжение, перегрузка по току, отказ энкодера | Стабилизируйте питание, уменьшите нагрузку, проверьте энкодер |
Примечание по безопасности: Всегда отключайте питание перед обслуживанием. В случае сложных неисправностей (например, короткого замыкания обмоток) обратитесь в сервисный центр.

- Распространенные неисправности и способы их устранения
Проблема | Возможная причина | Решение |
Ошибки позиционирования | Неисправность энкодера; Низкие настройки усиления; Механический люфт в ремнях/шестернях. | Осмотрите энкодер и кабели; повторно запустите автоматическую настройку для увеличения усиления; осмотрите и затяните механические компоненты трансмиссии. |
Перегрев | Постоянная перегрузка; Заблокированная вентиляция; Высокая температура окружающей среды. | Проверьте размеры двигателя; очистите поверхность двигателя; обеспечьте надлежащее охлаждение корпуса. |
Вибрация или шум | Несогласованные связи; высокие значения усиления; механический резонанс. | Выровняйте вал двигателя относительно нагрузки; уменьшите усиление вручную или выполните повторную настройку; активируйте режекторные фильтры в приводе. |
Коды ошибок водителя | Перенапряжение, перегрузка по току, неисправность энкодера. | Проверьте качество входящего электропитания; уменьшите скорость разгона или проверьте размеры двигателя; осмотрите кабель энкодера на наличие повреждений или ослабленного соединения. |
Сопутствующий продукт

Серводвигатели - это сердце точного управления движением, позволяя отраслям добиться автоматизации, скорости и надежности. Если вам нужна Серводвигатель постоянного тока для простого управления, Промышленный серводвигатель переменного тока для тяжелой автоматизации или мини-серводвигатель для компактной робототехники у нас есть правильное решение.
.
Это означает, что фактическое положение двигателя значительно отстает от заданного положения.
Возможные причины и решения:
1.Проблема с передачей сигнала
Причина: Неправильная проводка, поврежденные кабели кодера/питания или плохие соединения, приводящие к потере сигнала.
Решение: Еще раз проверьте проводку по схеме, осмотрите кабели на предмет повреждений и переподключите разъемы, чтобы обеспечить надлежащий контакт.
2.Ограничения реакции системы
Причина: Низкое усиление сервопривода, слишком короткое время ускорения/замедления или чрезмерная нагрузка.
Решение:
Увеличьте усиление контура положения и скорости или используйте автоматическую настройку усиления.
Увеличить время ускорения/замедления (рекомендуется S-образная кривая).
Пошаговая диагностика:
- Проверить источник команды – Убедитесь, что контроллер (например, ПЛК) действительно посылает импульсы (индикатор мигает).
- Проверьте проводку – Убедитесь, что кабели питания, управления и энкодера подключены правильно и не имеют повреждений.
- Проверьте тормоз – Для моделей, оборудованных тормозом, убедитесь, что катушка тормоза находится под напряжением и отпущена.
- Режим управления – Убедитесь, что водитель находится в режим управления положением, а не режим крутящего момента или скорости.
- Соответствие типа импульса – Убедитесь, что тип импульса (импульс + направление или квадратура A/B) соответствует настройкам драйвера.
Возможные причины:
Проблема с кабелем питания
- Причина: Ослабленное соединение фаз (U, V, W), вызывающее аномальный ток.
- Решение: Подтяните все соединения питания двигателя.
Системное колебание
- Причина: Чрезмерное усиление контура скорости, приводящее к вибрации даже в состоянии покоя.
- Решение: Уменьшите усиление или перезапустите автонастройку.
Механическая блокировка
Причина: Поврежденные подшипники или посторонние предметы, заклинившие вал.
Решение: Выключите двигатель и проверните вал вручную. Если сопротивление велико, осмотрите и отремонтируйте двигатель.
Причины и способы устранения:
Электромагнитные помехи
- Проверьте правильность заземления экранирующей оболочки кабеля питания и энкодера.
- Избегайте прокладки кабелей энкодера рядом с высоковольтными линиями инвертора.
Настройки параметров
- Уменьшите усиление контура положения, если оно слишком велико.
- Увеличьте «допуск на постоянную позицию», чтобы двигателю не приходилось бесконечно выполнять микрорегулировку.
Механические проблемы
Проверьте муфты, выравнивание и балансировку нагрузки.
- Крутящий момент инерции нагрузки: T=J×αT = J × α (J = инерция, α = угловое ускорение).
- Момент трения: Преодоление механического сопротивления.
- Крутящий момент силы тяжести: Для вертикальных осей (ось Z).
- Внешние силы: Например, сила резания.
- Практическое правило: После расчетов добавьте запас прочности 20–30%.
- Определение: Отношение инерции нагрузки к инерции ротора двигателя.
- Важность: Если соотношение >10:1, реакция становится вялой, возникают перерегулирование и вибрация.
- Идеальное соотношение: ≤5:1 для наилучшей производительности.
- Решение: Используйте редуктор или большую инерцию серводвигатель если возникло несоответствие.
Инкрементальный энкодер: Выводит относительное положение; требует возврата в исходное положение после включения питания.
Абсолютный энкодер: Запоминает абсолютное положение даже после отключения питания; возврат в исходное положение не требуется.
Что выбрать?
- Используйте инкрементный метод, если перемещение простое и стоимость имеет решающее значение.
- Используйте абсолютный вариант, если время простоя и точность имеют решающее значение (например, робототехника, многоосевые системы).
Силовые кабели: Можно удлинить, но потребуется более толстый провод, чтобы минимизировать падение напряжения.
Кабели энкодера: Очень чувствительный; избегайте удлинения более 20 м. Используйте экранированную витую пару и при необходимости рассмотрите возможность использования усилителей/фильтров.
Да. Правильное заземление обеспечивает безопасность и минимизирует помехи.
Клемма PE двигателя → подключите к PE драйвера коротким толстым проводом.
Клемма PE драйвера → подключить к шине заземления шкафа.
Экранирование кабеля → заземление только со стороны водителя, чтобы избежать образования контуров заземления.
- Высокая жесткость: Быстрая реакция, устойчива к возмущениям нагрузки, но существует риск колебаний.
- Низкая жесткость: Плавная работа, но слабая устойчивость к помехам.
Корректирование: Постепенно увеличивайте коэффициент усиления контура, пока не будет достигнут оптимальный отклик без вибрации. Используйте функцию автоматической настройки усиления драйвера, если она доступна.
Причина: Сервопривод непрерывно подает небольшие корректирующие токи для удержания положения («шум сервопривода»).
Исправления:
Уменьшите настройки усиления контура.
Применяйте режекторные фильтры для резонансных частот.
Увеличьте «допуск на постоянную позицию», чтобы система не допускала чрезмерной коррекции.
Компактные серводвигатели часто используются в Радиоуправляемые модели, дроны и образовательная робототехника.
Проверьте руководство по продукту для получения полной информации. характеристики серводвигателя, включая Подробная информация о штифтах серводвигателя, принцип работы и схемы электропроводки.