

स्टेपर मोटर्स का परिचय
ए स्टेपर मोटर एक ब्रशलेस, सिंक्रोनस इलेक्ट्रिक मोटर है जिसे एक पूर्ण घूर्णन को बड़ी संख्या में बराबर चरणों में विभाजित करने के लिए डिज़ाइन किया गया है। निर्माण इसमें आमतौर पर शामिल हैं:स्टेटर: चरणों में व्यवस्थित कई विद्युत चुम्बकीय कुंडलियों से सुसज्जित।रोटर: या तो एक स्थायी चुंबक या बारीक दांतेदार ध्रुवों के साथ एक परिवर्तनीय अनिच्छा डिजाइन।ड्राइव सर्किट (नियंत्रक): स्टेटर कॉइल्स को समयबद्ध स्पंद भेजता है, जिससे एक घूर्णनशील चुंबकीय क्षेत्र बनता है।
प्रत्येक आने वाली पल्स शाफ्ट को एक निश्चित चरण कोण (आमतौर पर 1.8° या 0.9°) इन स्पंदों की संख्या और आवृत्ति को नियंत्रित करके, स्टेपर मोटर्स प्राप्त करते हैं सटीक स्थिति और गति नियंत्रण ओपन-लूप सिस्टम में फीडबैक सेंसर की आवश्यकता के बिना।
प्रमुख लाभ:शुद्धता: दोहराए जाने योग्य गति की आवश्यकता वाले अनुप्रयोगों के लिए आदर्श;सरल नियंत्रण: स्थिति और गति सीधे इनपुट पल्स के समानुपाती होती है;विश्वसनीयता: कोई ब्रश नहीं = कम घिसाव और रखरखाव।
विशिष्ट अनुप्रयोग: 3डी प्रिंटर, सीएनसी मशीनें, रोबोटिक्स, भोजन पैकेजिंग मशीनें और लेबलिंग मशीनरी ।वगैरह
संक्षेप में, स्टेपर मोटर्स हैं आधुनिक स्वचालन की रीढ़, के बीच एक लागत प्रभावी संतुलन प्रदान करना परिशुद्धता, स्थायित्व और नियंत्रण सरलता.

स्टेपर मोटर का उपयोग किस लिए किया जाता है?
ए स्टेपर मोटर यह एक ब्रशलेस डीसी मोटर है जो डिजिटल पल्स सिग्नल को सटीक यांत्रिक कोणीय विस्थापन में परिवर्तित करती है। प्रत्येक इनपुट पल्स शाफ्ट को एक निश्चित कोण पर घुमाता है—जिसे "स्टेप" कहा जाता है। यह चरण-दर-चरण गति उत्कृष्ट प्रदर्शन प्रदान करती है। स्थिति सटीकता, गति नियंत्रण और दोहराव.
सामान्य अनुप्रयोग:
- पैकेज मशीन: खाद्य पैकेज मशीनें, मल्टीहेड वेइगर, कन्वेयर …
- 3डी प्रिंटर: प्रिंट हेड और बेड मूवमेंट को सटीक रूप से नियंत्रित करें।
- सीएनसी मशीनें: सटीक कटाई और नक्काशी के लिए उपकरण चलाएं।
- रोबोटिक्स: सटीक संयुक्त रोटेशन प्राप्त करें.
- चिकित्सा मशीनें: विश्लेषकों और स्कैनरों में नमूनों की सटीक स्थिति सुनिश्चित करें।

स्टेपर मोटर कार्य सिद्धांत
स्टेपर मोटर का सिद्धांत किस पर आधारित है? विद्युत चुंबकत्व और चरण-दर-चरण नियंत्रणप्रत्येक बार जब इनपुट पल्स सिग्नल प्राप्त होता है, तो मोटर एक निश्चित कोण (जिसे “स्टेप एंगल” के रूप में जाना जाता है) से घूमता है।
- विद्युतचुंबकीय उत्तेजना: नियंत्रक स्टेटर कॉइल के एक सेट को सक्रिय करता है, जिससे चुंबकीय क्षेत्र उत्पन्न होता है।
- रोटर संरेखण: रोटर (एक दांतेदार स्थायी चुंबक) स्वयं को सक्रिय स्टेटर दांतों के साथ संरेखित करता है।
- अनुक्रमिक स्विचिंग: नियंत्रक वर्तमान कुंडली को निष्क्रिय कर देता है और फिर अगली कुंडली को सक्रिय कर देता है, जिससे स्टेटर क्षेत्र स्थानांतरित हो जाता है।
- कदम गति: रोटर घूमते हुए चुंबकीय क्षेत्र का अनुसरण करते हुए चरणों में चलता है।
- पल्स आवृत्ति = गति
- नाड़ी गणना = स्थिति
इससे स्टेपर मोटर गति नियंत्रण और स्थिति नियंत्रण सरल, अत्यधिक दोहराने योग्य और सटीक है।
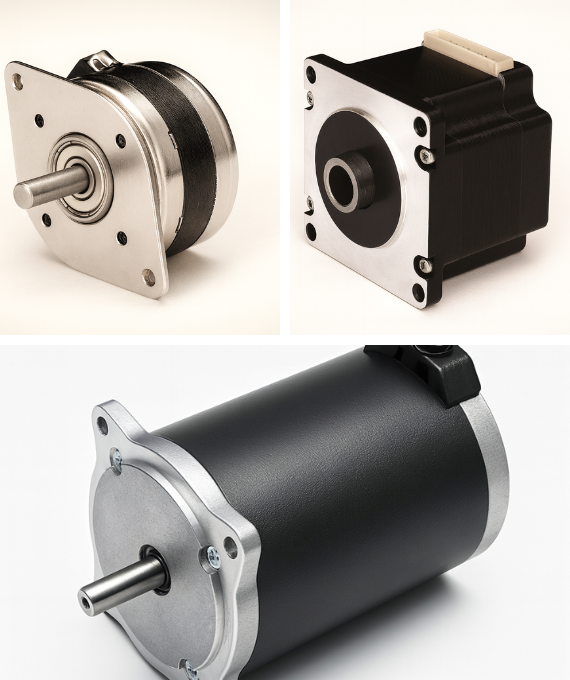
स्टेपर मोटर के प्रकार
1. मानक दो-चरण / तीन-चरण / पांच-चरण स्टेपर मोटर्स
- विवरण: हमारी उत्पाद श्रृंखला की नींव। ज़्यादा चरण = बेहतर प्रदर्शन।
- इसके लिए सर्वश्रेष्ठ: स्वचालित खाद्य मशीनें, सीएनसी मशीनें, कपड़ा और पैकेजिंग उपकरण।
2. नियंत्रक के साथ बंद-लूप स्टेपर मोटर
- विवरण: वास्तविक समय फ़ीडबैक के लिए उच्च-परिशुद्धता एनकोडर से सुसज्जित। स्टेपर्स के लागत लाभ को बनाए रखते हुए स्टेप लॉस को समाप्त करता है।
- इसके लिए सर्वश्रेष्ठ: ऐसे अनुप्रयोग जिनमें पूर्ण विश्वसनीयता और छूटे हुए चरणों के लिए शून्य सहनशीलता की आवश्यकता होती है।
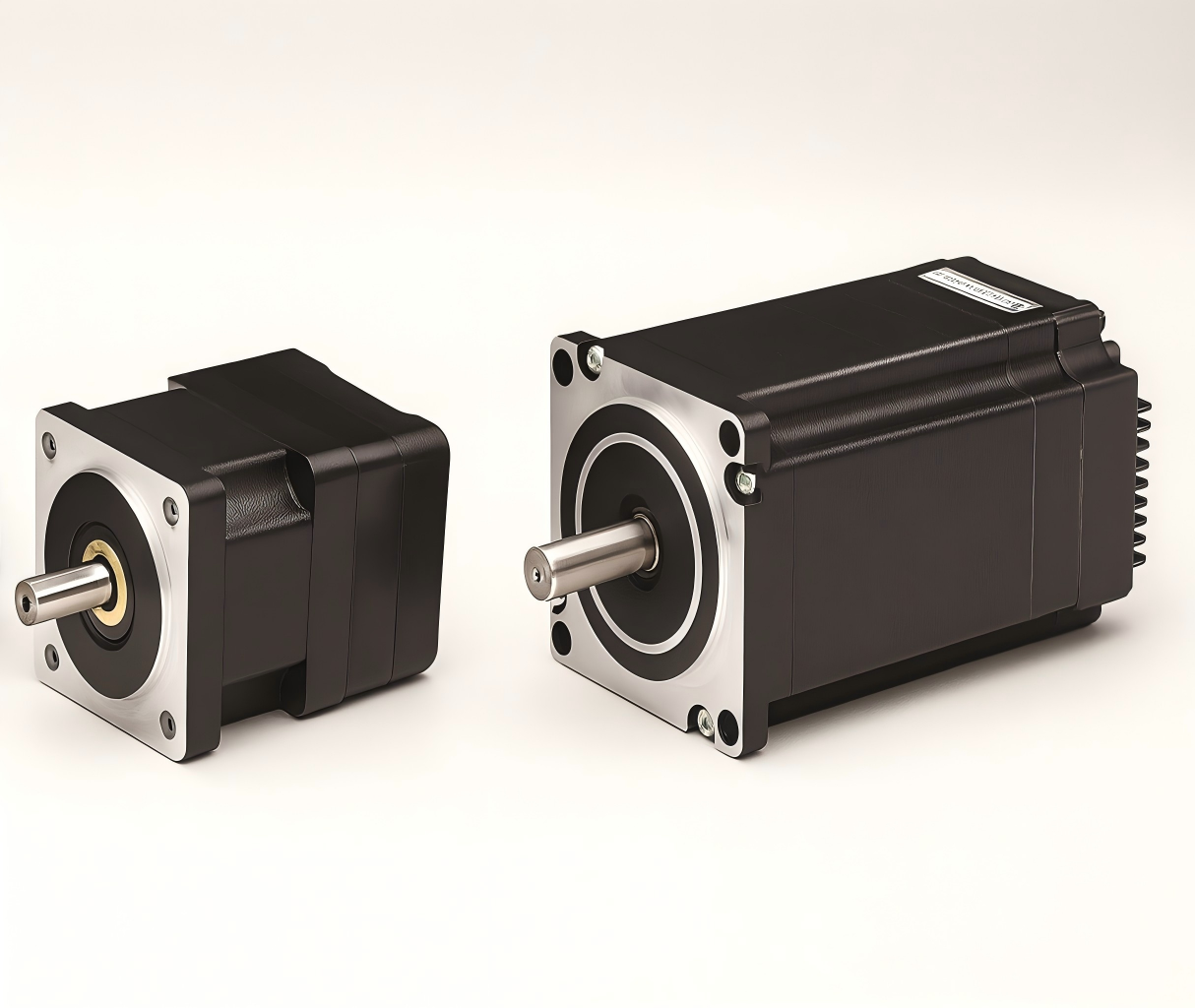
3. एकीकृत स्टेपर मोटर्स (मोटर + नियंत्रक)
- विवरण: स्टेपर मोटर और ड्राइवर को एक ही कॉम्पैक्ट यूनिट में संयोजित करता है। वायरिंग को सरल बनाता है, विद्युत चुम्बकीय हस्तक्षेप को कम करता है और जगह बचाता है।
- इसके लिए सर्वश्रेष्ठ: वितरित नियंत्रण प्रणाली और कॉम्पैक्ट उपकरण डिजाइन।
4. विशेष अनुप्रयोग स्टेपर मोटर्स (खोखले शाफ्ट / ब्रेक के साथ)
- खोखली शाफ़्ट: मोटर के माध्यम से केबल रूटिंग की अनुमति देता है, जिससे लेआउट सरल हो जाता है।
- ब्रेक के साथ: ऊर्ध्वाधर गति या बिजली बंद होने की स्थिति में सुरक्षा सुनिश्चित करता है।
- इसके लिए सर्वश्रेष्ठ: रोबोटिक्स, लिफ्ट और अद्वितीय स्वचालन चुनौतियाँ।
स्टेपर मोटर बनाम सर्वो मोटर
गति नियंत्रण में सबसे आम प्रश्नों में से एक है: सर्वो मोटर और स्टेपर मोटर के बीच क्या अंतर है?
| विशेषता | स्टेपर मोटर | सर्वो मोटर |
|---|---|---|
| नियंत्रण विधि | डिफ़ॉल्ट रूप से ओपन-लूप; एनकोडर के साथ क्लोज्ड-लूप भी हो सकता है | एनकोडर फीडबैक के साथ हमेशा बंद-लूप |
| लागत | कम लागत, सरल प्रणाली | उच्च लागत, जटिल प्रणाली |
| कम गति प्रदर्शन | कम गति पर उच्च टॉर्क कंपन दिखा सकता है | कम गति पर बहुत चिकनी और स्थिर |
| उच्च गति प्रदर्शन | उच्च गति पर टॉर्क कम हो जाता है | उच्च गति पर भी रेटेड टॉर्क बनाए रखता है |
| अधिभार क्षमता | कोई अधिभार सहनशीलता नहीं - चरण छूट सकते हैं | मजबूत अधिभार क्षमता (3× रेटेड टॉर्क तक) |
| प्रतिक्रिया | त्वरित प्रारंभ/रोक | तेज़ गतिशील प्रतिक्रिया |
| सर्वोत्तम उपयोग | सटीक स्थिति, स्थिर गति, लागत-संवेदनशील | उच्च गतिशील गति, भारी भार, टॉर्क-गहन कार्य |
निष्कर्ष:
-
एक विकल्प चुनें स्टेपर मोटर के लिए सटीक स्थिति और लागत दक्षता.
-
एक विकल्प चुनें सर्वो मोटर के लिए उच्च गति, उच्च टॉर्क, या अधिभार-प्रवण वातावरण.
मुख्य तकनीकी विनिर्देश
| पैरामीटर | विवरण | यह क्यों मायने रखती है |
|---|---|---|
| चौखटा का आकर | मोटर फ्लैंज आयाम | स्थापना अनुकूलता निर्धारित करता है; बड़ा आकार = अधिक टॉर्क |
| होल्डिंग टॉर्क | स्थैतिक धारण बल | भार स्थिरता सुनिश्चित करता है |
| चरण कोण | प्रति चरण कोणीय गति | छोटा कोण = उच्च परिशुद्धता |
| चरण धारा | ड्राइवर मिलान धारा | प्रभाव टॉर्क और हीटिंग |
| शरीर की लंबाई | मोटर बॉडी का आकार | लम्बा शरीर = समान फ्रेम आकार में अधिक टॉर्क |
| के चरण | 2, 3, या 5 | अधिक चरण = सुचारू संचालन |
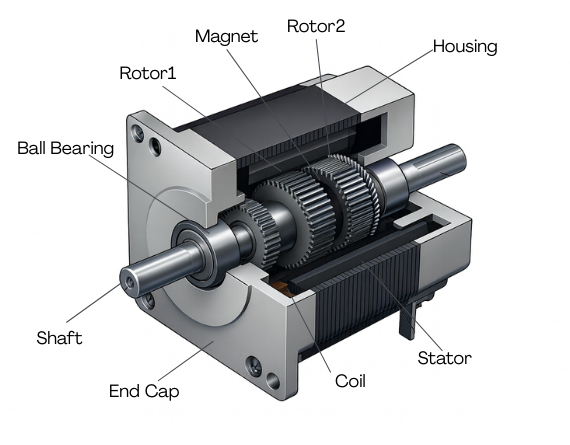
स्टेपर मोटर्स की आंतरिक संरचना
The स्टेपर मोटर्स की सटीक गति उनके मजबूत यांत्रिक और विद्युत चुम्बकीय संरचना. प्रत्येक उच्च गुणवत्ता वाले स्टेपर मोटर को सावधानीपूर्वक शिल्प कौशल के साथ बनाया गया है, जो डिजिटल पल्स को विश्वसनीय भौतिक गति में परिवर्तित करने के लिए डिज़ाइन किया गया है। हाइब्रिड स्टेपर मोटर सामंजस्य में काम करने वाली तीन प्रमुख सभाओं से बना है:
रोटर (घूर्णन कोर):
- स्थायी चुंबक: टॉर्क उत्पादन के लिए आवश्यक आधार चुंबकीय क्षेत्र प्रदान करता है।
- रोटर कोर: बारीक मशीनी सूक्ष्म-दांतों वाली लैमिनेटेड सिलिकॉन स्टील शीट। ये दांत स्टेटर क्षेत्र के साथ क्रिया करके स्टेपिंग गति उत्पन्न करते हैं।
- शाफ्ट: घूर्णी गति को बाह्य भार तक संचारित करता है।
- बॉल बेयरिंग: दोनों शाफ्ट के सिरों पर लगा हुआ, उच्च गति पर भी सुचारू, कम घर्षण वाले घूर्णन को समर्थन देता है।
स्टेटर (स्थिर भाग):
- स्टेटर कोर: यह लेमिनेटेड सिलिकॉन स्टील से बना है, तथा इसकी आंतरिक दीवार के चारों ओर कई बड़े खंभे लगे हैं।
- वाइंडिंग्स (कॉइल्स): प्रत्येक ध्रुव के चारों ओर उच्च शुद्धता वाले तांबे के तार लपेटे जाते हैं। इन घुमावों को क्रम से सक्रिय करके, रोटर को चरणबद्ध तरीके से चलाने के लिए एक घूर्णनशील चुंबकीय क्षेत्र बनाया जाता है।
अंत कैप्स (आवास):
- फ्रंट और रियर एंड कैप्स: आमतौर पर उच्च शक्ति वाले एल्यूमीनियम मिश्र धातु या स्टील से बने ये उपकरण रोटर और स्टेटर को सटीक रूप से घेरते हैं तथा बीयरिंग को अपने स्थान पर बनाए रखते हैं।
- फ्रंट एंड कैप (माउंटिंग फ्लैंज): मोटर के मानकीकृत फ्रेम आकार का निर्धारण करता है।

- स्टेपर मोटर विनिर्देश
- स्टेपर मोटर गति नियंत्रण
- स्टेपर मोटर वायरिंग
| विद्युत विनिर्देश | यांत्रिक विनिर्देश | ||
|---|---|---|---|
| चरण कोण सटीकता | ±51टीपी3टी | ढांकता हुआ ताकत | एसी 500V, 1 मिनट |
| परिवेश का तापमान | -20℃ ~ +50℃ (गैर-बर्फ़ीली) | इन्सुलेशन प्रतिरोध | 500V DC पर 100 MΩ न्यूनतम |
| अन्य विनिर्देश | रेडियल प्ले | 0.02 मिमी अधिकतम (500 ग्राम भार) | |
| अधिकतम स्वीकार्य तापमान | 80℃ | अक्षीय प्ले | 0.08 मिमी अधिकतम (500 ग्राम भार) |
| इन्सुलेशन वर्ग | कक्षा बी |
शब्दों का स्पष्टीकरण:
- चरण कोण सटीकता: मोटर के चरण कोण पर सहनशीलता (उदाहरणार्थ, 1.8° ±5%)।
- अधिकतम स्वीकार्य तापमान: संचालन के दौरान मोटर बॉडी का अधिकतम सुरक्षित तापमान।
- परिवेश का तापमान: मोटर के संचालन के स्थान के आसपास की हवा के तापमान की स्वीकार्य सीमा।
- इन्सुलेशन वर्ग: मोटर के इन्सुलेशन सिस्टम की तापीय सहनशीलता को परिभाषित करने वाला एक वर्गीकरण (वर्ग बी सामान्य है)।
- परावैद्युत सामर्थ्य (हाई-पॉट परीक्षण): इन्सुलेशन की क्षमता, बिना टूटे वाइंडिंग और मोटर फ्रेम के बीच उच्च वोल्टेज क्षमता को झेलने की।
- इन्सुलेशन प्रतिरोध: वाइंडिंग और मोटर फ्रेम के बीच इन्सुलेशन के प्रतिरोध का एक माप।
- रेडियल प्ले: शाफ्ट की अधिकतम स्वीकार्य गति (बैकलैश) जब शाफ्ट अक्ष के लंबवत बल लगाया जाता है।
- अक्षीय प्ले: शाफ्ट अक्ष के साथ बल लागू होने पर शाफ्ट की अधिकतम स्वीकार्य गति (बैकलैश)।
स्टेपर मोटर्स एक गति से घूमती हैं इनपुट पल्स की आवृत्ति के समानुपातीसुचारू त्वरण और मंदी के लिए, आपको सटीक पल्स-आवृत्ति समायोजन में सक्षम नियंत्रक की आवश्यकता होती है।
हमारे ड्राइवर समर्थन करते हैं 256 उपविभागों तक माइक्रोस्टेपिंग, जो बहुत कम गति पर भी अत्यंत सुचारू गति की अनुमति देता है।
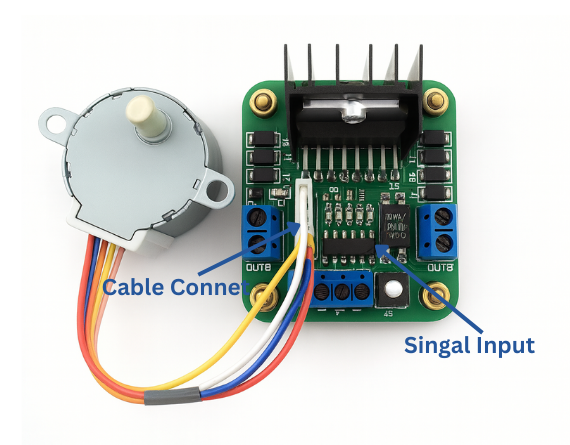
सही तारों प्रदर्शन के लिए आवश्यक है.
-
द्विध्रुवी वायरिंग (4 तार): उच्च टॉर्क प्रदान करता है, अधिक जटिल ड्राइवरों की आवश्यकता होती है।
-
एकध्रुवीय वायरिंग (5 या 6 तार): चलाने में सरल, टॉर्क-कुशलता थोड़ी कम।
हम प्रदान स्पष्ट वायरिंग आरेख और निर्बाध एकीकरण सुनिश्चित करने के लिए तकनीकी सहायता।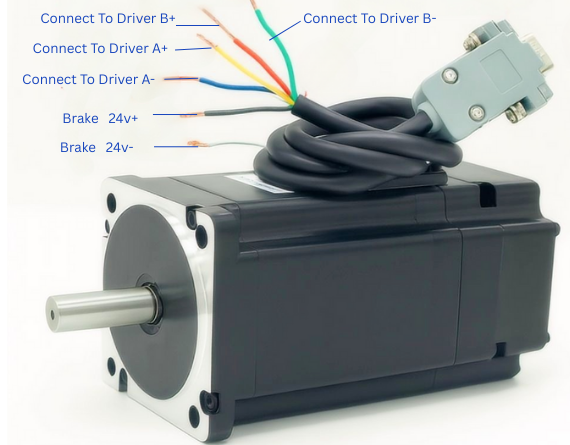
संबंधित उत्पाद




क्या आप अपने अगले प्रोजेक्ट को संचालित करने के लिए तैयार हैं?
हमारी इंजीनियरिंग टीम मोटर चयन से लेकर पूर्ण एकीकरण तक आपकी परियोजना का समर्थन करने के लिए तैयार है।
📞 तकनीकी हॉटलाइन: +0086-13536680274
📧 ईमेल:info@fill-package.com
💬 ऑनलाइन फॉर्म: https://fill-package.com/contact-us/
चलो लाते हैं सटीक और शक्तिशाली गति आपके सिस्टम पर.
.
स्टेपर मोटर्स हैं डीसी-संचालित उपकरणइन्हें सीधे कच्ची डीसी बिजली आपूर्ति से नहीं चलाया जा सकता, बल्कि इसके लिए एक स्टेपर मोटर नियंत्रक/चालक, जो इनपुट पल्स को सटीक कॉइल एनर्जाइजिंग अनुक्रमों में अनुवादित करता है।
अधिकांश प्रणालियाँ एक से संचालित होती हैं विनियमित डीसी आपूर्ति, आमतौर पर 24V से 48V, हालांकि औद्योगिक मॉडल व्यापक रेंज का समर्थन कर सकते हैं।
यह सबसे आम चयन प्रश्न है।
-
नियंत्रण विधि: स्टेपर मोटर्स आमतौर पर संचालित होते हैं ओपन-लूप नियंत्रण (कोई फीडबैक नहीं), जिससे सिस्टम सरल और कम लागत वाला हो जाता है। सर्वो मोटर्स को बंद लूप एनकोडर फीडबैक के साथ, वे अधिक जटिल और महंगे हो जाते हैं।
-
प्रदर्शन: स्टेपर मोटर्स प्रदान करते हैं कम गति पर उच्च टॉर्क, लेकिन उच्च गति पर टॉर्क कम हो जाता है, और वे ओवरलोड को संभाल नहीं पाते। सर्वो मोटर संपूर्ण गति सीमा में स्थिर टॉर्क और मजबूत अधिभार क्षमता है।
-
आवेदन पत्र: एक विकल्प चुनें स्टेपर मोटर यदि आपके आवेदन की आवश्यकता है स्थिर भार के साथ लागत प्रभावी, सटीक स्थिति निर्धारण। एक विकल्प चुनें सर्वो मोटर यदि आपकी परियोजना की आवश्यकता है बहुत उच्च गतिशील प्रतिक्रिया, गति, या टॉर्क नियंत्रण.
-
हमारा समाधान: हमारा बंद-लूप स्टेपर मोटर श्रृंखला यह दोनों के लाभों को जोड़ता है - बहुत कम लागत पर सर्वो जैसी विश्वसनीयता।
होल्डिंग टॉर्क वह अधिकतम टॉर्क है जो एक मोटर सक्रिय रहते हुए, लेकिन घूमते हुए, प्रदान कर सकती है। यह एक मुख्य निष्पादन संकेतक मोटर कितना "बल" धारण कर सकती है।
- उच्च होल्डिंग टॉर्क बेहतर है, लेकिन केवल उचित सीमा के भीतर।
- अधिक निर्दिष्ट टॉर्क बढ़ने से लागत, आकार और बिजली की खपत अनावश्यक रूप से.
- सबसे अच्छा अभ्यास यह है कि आप अपने अनुप्रयोग के लिए आवश्यक अधिकतम टॉर्क की गणना करें और एक मोटर का चयन करें 30–50% सुरक्षा मार्जिन.
- खुला लूप: नियंत्रक केवल पल्स कमांड भेजता है, यह जाँचे बिना कि मोटर वास्तव में उस स्थिति तक पहुँची है या नहीं। सरल और किफ़ायती, अधिकांश बुनियादी अनुप्रयोगों के लिए उपयुक्त।
- बंद लूप: मोटर में एक एनकोडर जो रीयल-टाइम फीडबैक प्रदान करता है। ड्राइवर कमांड पोजीशन की तुलना वास्तविक पोजीशन से करता है और किसी भी त्रुटि को तुरंत ठीक कर देता है। इससे प्रदर्शन में नाटकीय रूप से सुधार होता है सटीकता और विश्वसनीयता, विशेष रूप से भारी भार के तहत
- दो-चरण: सबसे आम और लागत प्रभावी, सामान्य स्वचालन के लिए उपयुक्त।
- तीन फ़ेज़: दो-चरण की तुलना में अधिक सुचारू गति और कम कंपन प्रदान करता है।
- पांच चरण: वितरित करता है सबसे सुचारू और शांत संचालन, कम प्रतिध्वनि के साथ, उच्च परिशुद्धता अनुप्रयोगों के लिए आदर्श।
- रफ़्तार: पल्स आवृत्ति (प्रति सेकंड पल्स) द्वारा निर्धारित। उच्च आवृत्ति = तेज़ गति।
- दिशा: दिशा संकेत लाइन (डीआईआर पिन, उच्च/निम्न स्तर) द्वारा नियंत्रित।
- कोण: कुल स्पंदों की संख्या से निर्धारित। अधिक स्पंद = बड़ा घूर्णन कोण।
माइक्रोस्टेपिंग एक ड्राइव तकनीक है जो मोटर के पूर्ण चरण (जैसे, 1.8°) को कई छोटे चरणों में विभाजित करती है।
-
उच्चतर रिज़ॉल्यूशन: बहुत बेहतर स्थिति निर्धारण सक्षम बनाता है।
-
सुचारू गति: कम गति के कंपन और शोर को कम करता है।
हमारे ड्राइवर अधिकतम तक का समर्थन करते हैं प्रति चरण 256 माइक्रोस्टेप्स अति-सुचारु प्रदर्शन के लिए.
हाँ-ड्राइवर अनिवार्य हैस्टेपर मोटर को सीधे डीसी सप्लाई से जोड़कर नहीं चलाया जा सकता। ड्राइवर नियंत्रण संकेतों (पल्स और दिशा) को मोटर कॉइल के लिए सही समय और धारा में परिवर्तित करता है।
हाँ, गर्म होना सामान्य है। स्टेपर मोटर स्थिर अवस्था में भी टॉर्क बनाए रखने के लिए धारा खींचती रहती हैं।
-
सुरक्षित संचालन संभव है 80°C सतह का तापमान.
-
अत्यधिक गर्मी संकेत कर सकती है ओवरकरंट सेटिंग्स ड्राइवर पर.
-
हमारा बंद-लूप और एकीकृत स्टेपर मोटर्स शामिल करना स्मार्ट वर्तमान नियंत्रण, अनावश्यक तापन को कम करना और दक्षता में सुधार करना।
स्टेप लॉस तब होता है जब मोटर इनपुट कमांड का पालन नहीं कर पाती। सामान्य कारणों में शामिल हैं:
- लोड टॉर्क मोटर क्षमता से अधिक है।
- त्वरण/मंदन दर बहुत आक्रामक रूप से निर्धारित की गई है।
- ड्राइवर करंट बहुत कम है.
- ट्रांसमिशन प्रणाली में यांत्रिक जामिंग।
- आपूर्ति वोल्टेज बहुत कम है, विशेष रूप से उच्च गति पर।
स्टेपर मोटर्स का एक मुख्य लाभ यह है कम रखरखाव:
- कोई ब्रश नहीं → न्यूनतम घिसाव।
- बस सुनिश्चित करें साफ सतहें और अच्छा वेंटिलेशन.
- तारों और कनेक्टर्स की नियमित जांच करें।
- लंबे समय तक उपयोग के बाद असामान्य शोर के लिए बियरिंग्स की निगरानी करें।
- संक्षारक या चरम वातावरण से बचें।